| ::sfu>ensc>ramp>mpk | |||||
|
MPK-Home Architecture Components Publications Demo Program Videos Downloads Contributors Reference Development |
Demo
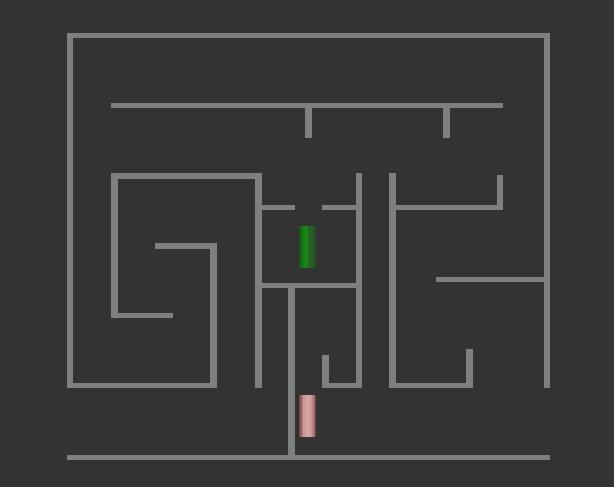
Basic motion planning problemWith the experiment scene as shown in the following left figure, the video on the right shows you a planning of the Lazy-PRM planner [5]. In the shown scene, the red square is the robot in the start configuration, and the green one is the goal.
Path planning problem for closed-chain robotsA 2D closed-chian robot with 12 DOFs, and the path planner used is [12].Get the Flash Player to see this player. Path planning with given end-effector pathA 6-DOF snake like robot moving along a given end-effector path, and the path planner used is [9].Get the Flash Player to see this player. Path planning with general end-effector constraintsGiven end-effector position constraints. A 3D PUMA-like robot manipulator is required to move its end-effector in a plane parallel to the floor. In the environment there is a fence around the robot and several other obstacles. The start configuration and the goal are in different cells of the fence, and the robot has to move out of a gap in the fence and go through another gap to reach the goal.Get the Flash Player to see this player. Given end-effector orient constraints The shown robot manipulator has kinematic structure similar to that of the Canadarm2, the Space Station Remote Manipulator System (SSRMS). It has 7 DOFs and the task is to move a large payload while maintaining the payload orientation upwards. In the figure, the large cylinder at the tip of SSRMS represents the payload.Get the Flash Player to see this player. |
||||
| Updated on May 10, 2007 by Zhenwang Yao . | |||||
|
|
|
|