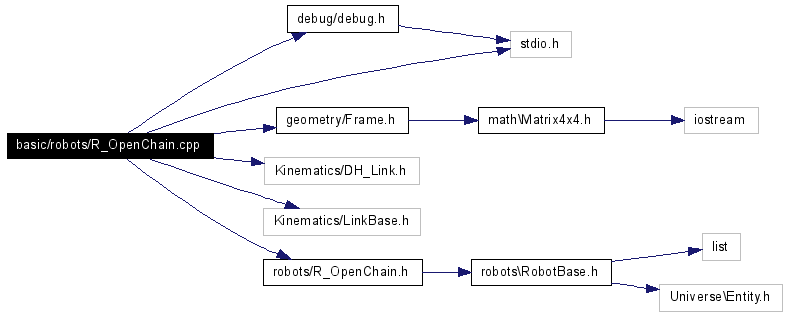
#include "debug/debug.h"#include "geometry/Frame.h"#include "Kinematics/DH_Link.h"#include "Kinematics/LinkBase.h"#include "robots/R_OpenChain.h"#include <stdio.h>Include dependency graph for R_OpenChain.cpp:
Go to the source code of this file.
 1.4.6-NO
1.4.6-NO