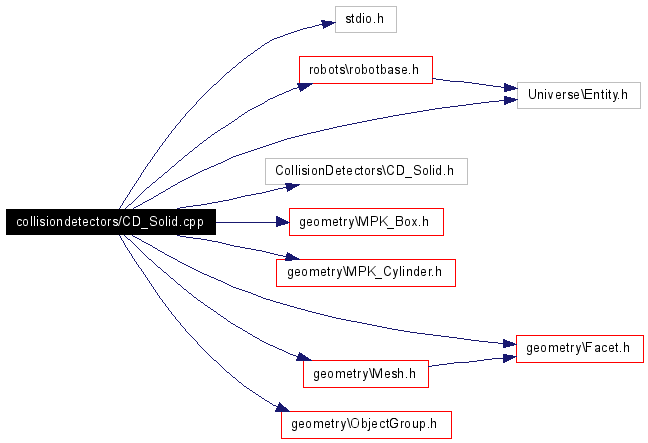
#include <stdio.h>#include "robots\robotbase.h"#include "CollisionDetectors\CD_Solid.h"#include "Universe\Entity.h"#include "geometry\MPK_Box.h"#include "geometry\MPK_Cylinder.h"#include "geometry\Facet.h"#include "geometry\Mesh.h"#include "geometry\ObjectGroup.h"Include dependency graph for CD_Solid.cpp:
Go to the source code of this file.
 1.4.6-NO
1.4.6-NO