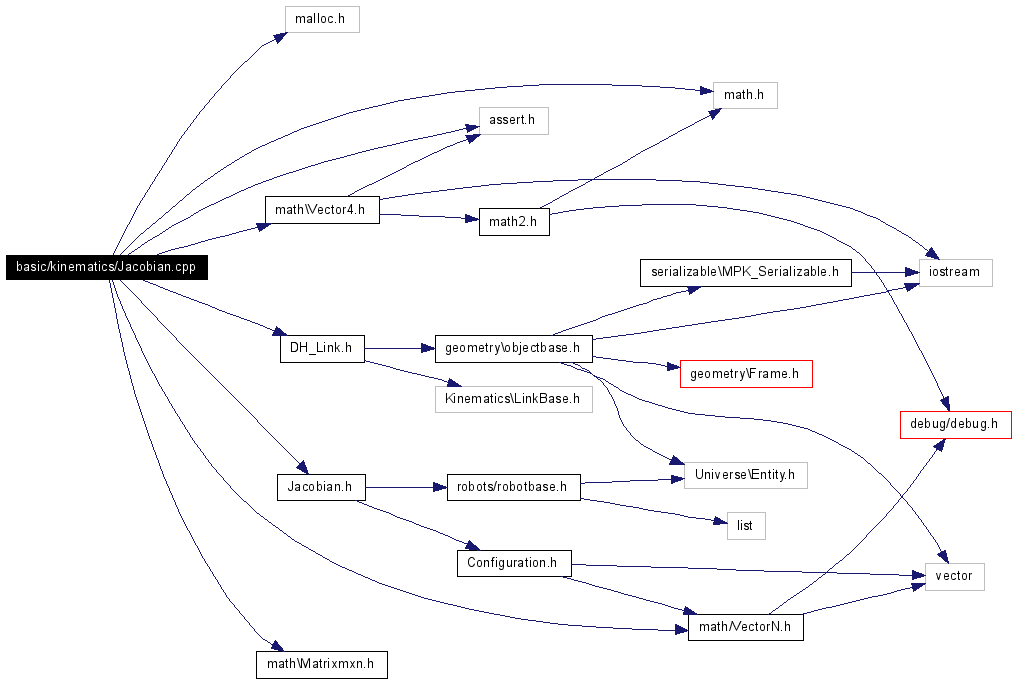
#include <malloc.h>#include <assert.h>#include <math.h>#include "Jacobian.h"#include "DH_Link.h"#include "math\Matrixmxn.h"#include "math\VectorN.h"#include "math\Vector4.h"Include dependency graph for Jacobian.cpp:
Go to the source code of this file.
Defines | |
| #define | PI 3.1415926535897932384 |
| #define | END_EFF_DOF 2 |
|
|
Definition at line 36 of file Jacobian.cpp. |
|
|
Definition at line 35 of file Jacobian.cpp. Referenced by PL_Sequential::index_to_rad(), PL_Sequential::initialize_parameters(), PL_Sequential::rad_to_index(), and PL_Sequential::shift_dofpath(). |
 1.4.6-NO
1.4.6-NO