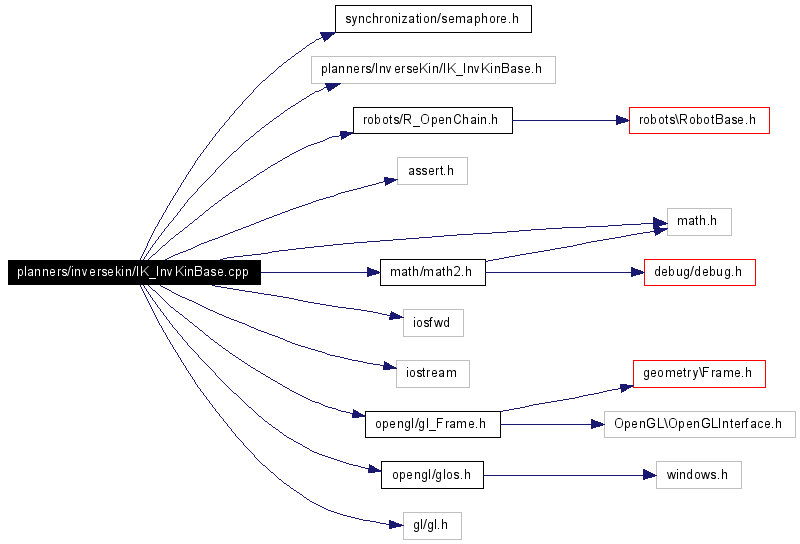
#include "synchronization/semaphore.h"#include "planners/InverseKin/IK_InvKinBase.h"#include "robots/R_OpenChain.h"#include <assert.h>#include <math.h>#include <math/math2.h>#include <iosfwd>#include <iostream>#include <opengl/gl_Frame.h>#include "opengl/glos.h"#include <gl/gl.h>Include dependency graph for IK_InvKinBase.cpp:
Go to the source code of this file.
Variables | |
| static const int | FRAMEDOF = 6 |
|
|
Definition at line 35 of file IK_InvKinBase.cpp. |
 1.4.6-NO
1.4.6-NO