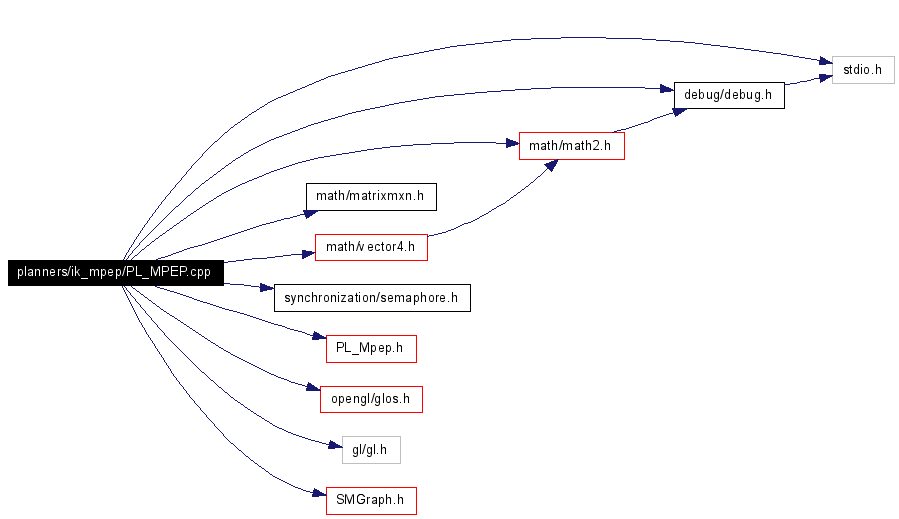
#include <stdio.h>#include "math/math2.h"#include "math/matrixmxn.h"#include "math/vector4.h"#include <synchronization/semaphore.h>#include "PL_Mpep.h"#include "opengl/glos.h"#include <gl/gl.h>#include "SMGraph.h"#include "debug/debug.h"Include dependency graph for PL_MPEP.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | std |
Defines | |
| #define | _FIRST_POSE (0) |
| #define | _LAST_POSE (poses.size()-1) |
| #define | DEF_SMG_STEPSIZE 10 |
| #define | DEF_ERROR_TOLERANCE 0.01 |
| #define | MAX_SMG_EXTEND_RETRY 10 |
Variables | |
| static int | numSMGraph = 0 |
| static int | numSMGNode = 0 |
| static int | numFinalSMGraph = 0 |
| static int | numFinalSMGNode = 0 |
| static int | numSMGraphInPath = 0 |
| static int | numSMGNodeInPath = 0 |
| static int | numTotalNode = 0 |
|
|
Definition at line 53 of file PL_MPEP.cpp. Referenced by PL_MPEP::InitializeTree(), PL_MPEP::Planner_Greedy(), PL_MPEP::Planner_IMP_Greedy(), PL_MPEP::Planner_RRT_Like(), PL_MPEP::Planner_SMG_Greedy(), PL_MPEP::Planner_SMG_RRT_Connect_Like(), and PL_MPEP::Planner_SMG_RRT_Greedy_Like(). |
|
|
|
Definition at line 56 of file PL_MPEP.cpp. |
|
|
Definition at line 55 of file PL_MPEP.cpp. |
|
|
Definition at line 58 of file PL_MPEP.cpp. |
|
|
Definition at line 63 of file PL_MPEP.cpp. Referenced by PL_MPEP::Establish_Self_Motion_Graph(), PL_MPEP::Planner_SMG_Greedy(), and PL_MPEP::Planner_SMG_RRT_Greedy_Like(). |
|
|
Definition at line 62 of file PL_MPEP.cpp. Referenced by PL_MPEP::Establish_Self_Motion_Graph(), PL_MPEP::Planner_SMG_Greedy(), and PL_MPEP::Planner_SMG_RRT_Greedy_Like(). |
|
|
Definition at line 61 of file PL_MPEP.cpp. Referenced by PL_MPEP::Establish_Self_Motion_Graph(), PL_MPEP::Planner_SMG_Greedy(), and PL_MPEP::Planner_SMG_RRT_Greedy_Like(). |
|
|
Definition at line 65 of file PL_MPEP.cpp. Referenced by PL_MPEP::RetrievePathFromTree(). |
|
|
Definition at line 60 of file PL_MPEP.cpp. Referenced by PL_MPEP::Establish_Self_Motion_Graph(), PL_MPEP::Planner_SMG_Greedy(), and PL_MPEP::Planner_SMG_RRT_Greedy_Like(). |
|
|
Definition at line 64 of file PL_MPEP.cpp. Referenced by PL_MPEP::RetrievePathFromTree(). |
|
|
Definition at line 66 of file PL_MPEP.cpp. Referenced by PL_MPEP::ClearTree(), PL_MPEP::Plan(), and PL_MPEP::RetrievePathFromTree(). |
 1.4.6-NO
1.4.6-NO