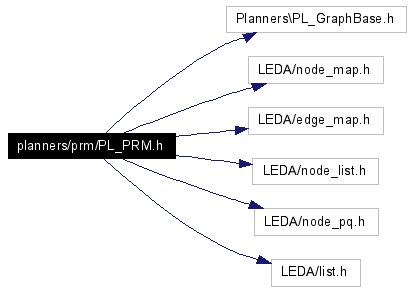
#include "Planners\PL_GraphBase.h"#include <LEDA/node_map.h>#include <LEDA/edge_map.h>#include <LEDA/node_list.h>#include <LEDA/node_pq.h>#include <LEDA/list.h>Include dependency graph for PL_PRM.h:
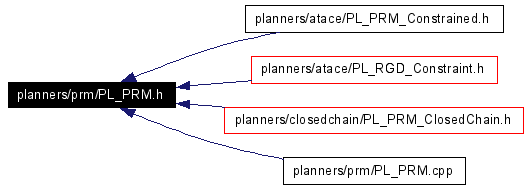
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | PL_PRM |
Defines | |
| #define | PL_PRM_h 1 |
Enumerations | |
| enum | PRM_StateMachineType { PRM_DONE = 0, PRM_START = 1, PRM_BUILD_INIT_ROADMAP, PRM_FIND_PATH, PRM_VERIFY_PATH, PRM_TRANSLATE_PATH, PRM_ENHANCE_ROADMAP, PRM_TIMER_EXPIRED = -1, PRM_FAILURE = -2 } |
|
|
|
|
|
|
 1.4.6-NO
1.4.6-NO