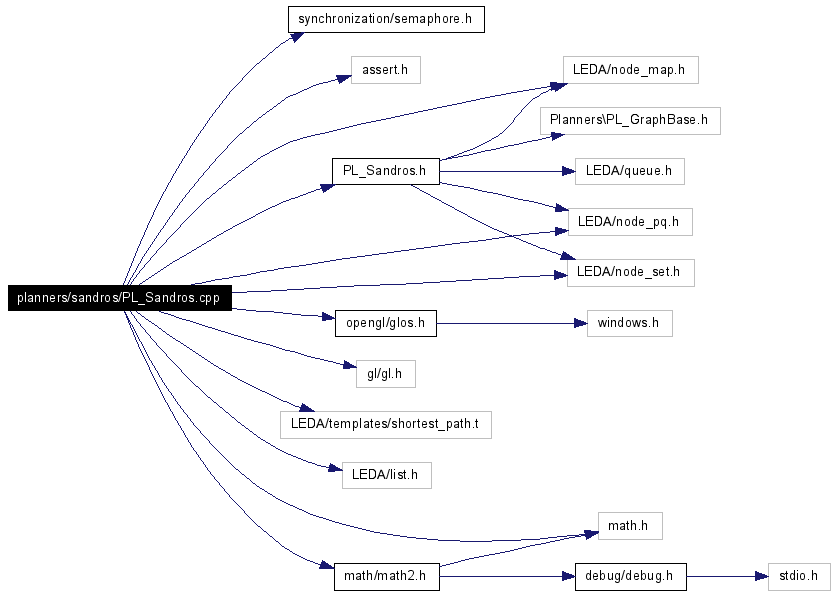
#include "synchronization/semaphore.h"#include <assert.h>#include "PL_Sandros.h"#include "opengl/glos.h"#include <gl/gl.h>#include <LEDA/node_map.h>#include <LEDA/node_pq.h>#include <LEDA/node_set.h>#include <LEDA/templates/shortest_path.t>#include <LEDA/list.h>#include <math.h>#include "math/math2.h"Include dependency graph for PL_Sandros.cpp:
Go to the source code of this file.
Defines | |
| #define | LEDA_CHECKING_OFF |
| #define | for_allnodes_inV(v, G) |
| #define | for_allnodes_inPs(v, G) |
| #define | for_allnodes_inPsNoIsland(v, G) |
| #define | for_allnodes_inPt(v, G) |
| #define | forall_nodesSan(v, G) |
|
|
Value: forall_nodes(v, G)\
if(m_nodeUVPsPt[v]==NodeInPs)
Definition at line 30 of file PL_Sandros.cpp. Referenced by PL_Sandros::ConstructGraph(). |
|
|
Value: forall_nodes(v, G)\
if(m_nodeUVPsPt[v]==NodeInPs&&m_nodeInPsIsland[v]==false)
Definition at line 33 of file PL_Sandros.cpp. Referenced by PL_Sandros::SearchForSequence(). |
|
|
Value: forall_nodes(v, G)\
if(m_nodeUVPsPt[v]==NodeInPt)
Definition at line 37 of file PL_Sandros.cpp. |
|
|
Value: forall_nodes(v, G)\
if(m_nodeUVPsPt[v]==NodeInV)
Definition at line 27 of file PL_Sandros.cpp. |
|
|
Value: forall_nodes(v, G)\
if(m_nodeUVPsPt[v]==NodeInPt||m_nodeUVPsPt[v]==NodeInPs||m_nodeUVPsPt[v]==NodeInV)
Definition at line 40 of file PL_Sandros.cpp. |
|
|
Definition at line 23 of file PL_Sandros.cpp. |
 1.4.6-NO
1.4.6-NO