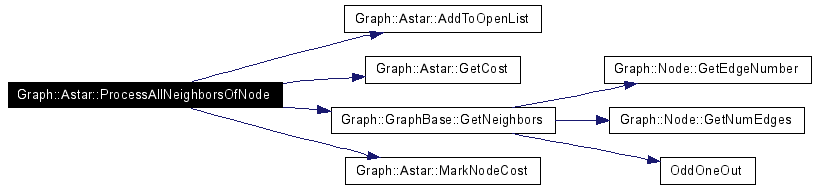
Definition at line 77 of file astar.cpp.
References AddToOpenList(), GetCost(), Graph::GraphBase::GetNeighbors(), and MarkNodeCost().
Referenced by Search().
Here is the call graph for this function:
#include <math/astar.h>
Public Member Functions | |
| std::vector< int > | GetPath () const |
| void | Search (const GraphBase &g, const int start, const int end) |
Protected Member Functions | |
| void | AddToOpenList (const int nodeNumber) |
| double | GetCost (const int nodeNumber) |
| int | GetNodeFromOpenList () const |
| void | MarkNodeCost (const int nodeNumber, const double cost) |
| bool | OpenListIsEmpty () const |
| void | ProcessAllNeighborsOfNode (const GraphBase &g, const int node) |
| void | RemoveNodeFromOpenList (const int nodeNum) |
| int | SmallestNeighbor (const GraphBase &g, const int node) |
Private Attributes | |
| std::set< int > | m_OpenList |
| std::vector< double > | m_Costs |
| std::vector< int > | m_Path |
Definition at line 17 of file astar.h.
|
|
Definition at line 14 of file astar.cpp. References m_OpenList. Referenced by ProcessAllNeighborsOfNode(), and Search(). |
|
|
Definition at line 24 of file astar.cpp. References m_Costs. Referenced by ProcessAllNeighborsOfNode(), and Search(). |
|
|
Definition at line 35 of file astar.cpp. References m_OpenList. Referenced by Search(). |
|
|
Definition at line 46 of file astar.cpp. References m_Path. |
|
||||||||||||
|
Definition at line 56 of file astar.cpp. References m_Costs. Referenced by ProcessAllNeighborsOfNode(), and Search(). |
|
|
Definition at line 66 of file astar.cpp. References m_OpenList. Referenced by Search(). |
|
||||||||||||
|
Definition at line 77 of file astar.cpp. References AddToOpenList(), GetCost(), Graph::GraphBase::GetNeighbors(), and MarkNodeCost(). Referenced by Search(). Here is the call graph for this function: |
|
|
Definition at line 101 of file astar.cpp. References m_OpenList. Referenced by Search(). |
|
||||||||||||||||
|
Definition at line 111 of file astar.cpp. References AddToOpenList(), GetCost(), GetNodeFromOpenList(), Graph::GraphBase::GetNumNodes(), IJG_Assert, m_Costs, m_Path, MarkNodeCost(), OpenListIsEmpty(), ProcessAllNeighborsOfNode(), RemoveNodeFromOpenList(), and SmallestNeighbor(). Here is the call graph for this function: 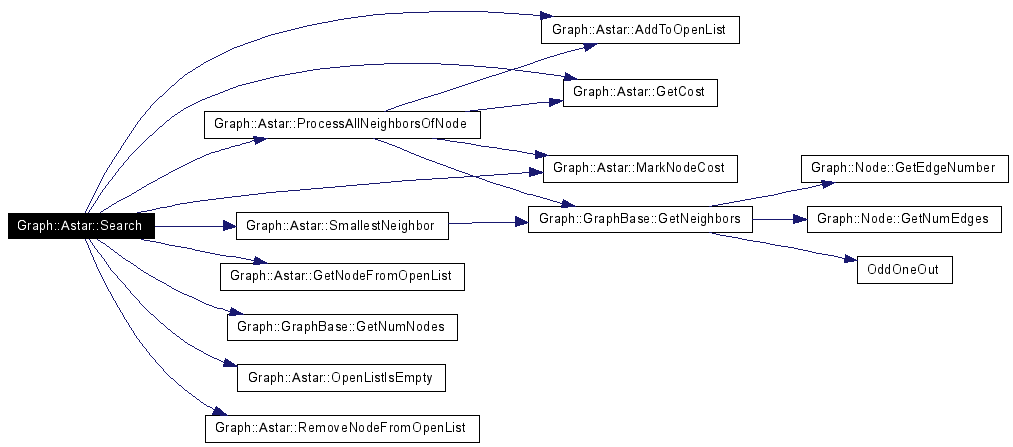 |
|
||||||||||||
|
Definition at line 170 of file astar.cpp. References Graph::GraphBase::GetNeighbors(), and m_Costs. Referenced by Search(). Here is the call graph for this function:  |
|
|
Definition at line 33 of file astar.h. Referenced by GetCost(), MarkNodeCost(), Search(), and SmallestNeighbor(). |
|
|
Definition at line 32 of file astar.h. Referenced by AddToOpenList(), GetNodeFromOpenList(), OpenListIsEmpty(), and RemoveNodeFromOpenList(). |
|
|
|
 1.4.6-NO
1.4.6-NO