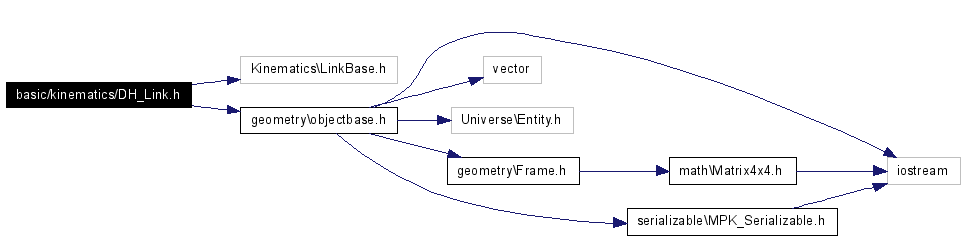
#include "Kinematics\LinkBase.h"#include "geometry\objectbase.h"Include dependency graph for DH_Link.h:
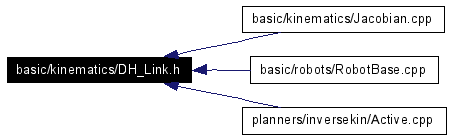
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | DH_Link |
Defines | |
| #define | DH_Link_h 1 |
Enumerations | |
| enum | DH_Parameter { DH_NONE = -1, DH_A, DH_ALPHA, DH_D, DH_THETA } |
Functions | |
| std::ostream & | operator<< (std::ostream &os, const DH_Link &v) |
| IfstreamWithComments & | operator>> (IfstreamWithComments &is, DH_Link &v) |
|
|
|
|
|
|
|
||||||||||||
|
Definition at line 426 of file DH_Link.cpp. References DH_Link::a, DH_Link::alpha, DH_Link::d, DH_Link::frame, DH_Link::theta, and DH_Link::type. |
|
||||||||||||
|
Definition at line 443 of file DH_Link.cpp. References DH_Link::DeSerialize(), eatwhite(), and IfstreamWithComments::getline(). Here is the call graph for this function: 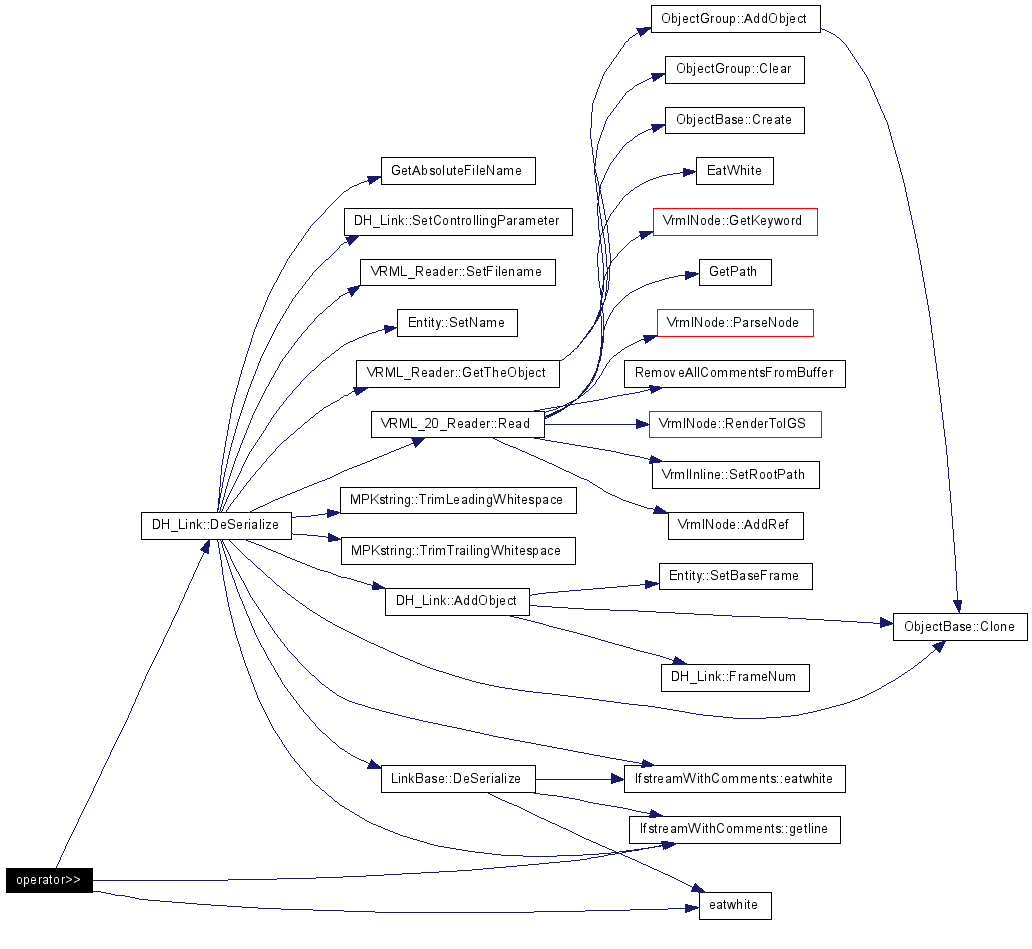 |
 1.4.6-NO
1.4.6-NO