#include <basic/kinematics/DH_Link.h>
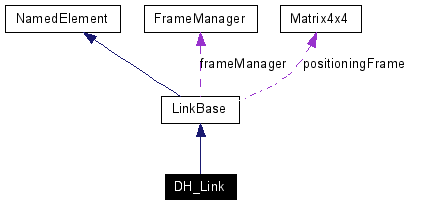
Inherits LinkBase.
Inheritance diagram for DH_Link:
Public Member Functions | |
| DH_Link (FrameManager *frameManager) | |
| DH_Link (const DH_Link &right) | |
| virtual | ~DH_Link () |
| virtual void | UpdateFrames () const |
| unsigned int | FrameNum () const |
| virtual LinkBase * | Clone () const |
| void | SetAlpha (const double value) |
| void | SetA (const double value) |
| void | SetD (const double value) |
| void | SetTheta (const double value) |
| __inline double | GetA () const |
| __inline double | GetD () const |
| __inline double | GetAlpha () const |
| __inline double | GetTheta () const |
| void | SetControllingParameter (DH_Parameter parameter) |
| virtual void | SetJointVariable (const double newValue) |
| virtual bool | DoesLinkControlFrame (const unsigned int frameNum) const |
| virtual void | Serialize (ostream &os) const |
| virtual void | AddObject (const ObjectBase *object) |
| virtual bool | DeSerialize (IfstreamWithComments &is) |
| double | GetJointVariable () const |
| DH_Parameter | GetJointType () const |
| Frame | GetFrame () const |
| Frame & | GetFrame (Frame &frame) |
Protected Attributes | |
| unsigned int | frame |
| double | alpha |
| double | a |
| double | d |
| double | theta |
| double * | q |
| DH_Parameter | type |
Friends | |
| std::ostream & | operator<< (std::ostream &os, const DH_Link &v) |
| std::istream & | operator>> (std::istream &is, DH_Link &v) |
Definition at line 57 of file DH_Link.h.
|
|
Definition at line 47 of file DH_Link.cpp. References FrameManager::AddFrame(), LinkBase::controlledFrames, frame, LinkBase::frameManager, and FrameNum(). Referenced by Clone(). Here is the call graph for this function:  |
|
|
Definition at line 66 of file DH_Link.cpp. |
|
|
Definition at line 111 of file DH_Link.cpp. References q. |
|
|
Definition at line 265 of file DH_Link.cpp. References ObjectBase::Clone(), FrameNum(), LinkBase::objects, and Entity::SetBaseFrame(). Referenced by DeSerialize(). Here is the call graph for this function:  |
|
|
Implements LinkBase. Definition at line 168 of file DH_Link.cpp. References DH_Link(). Here is the call graph for this function:  |
|
|
Reimplemented from LinkBase. Definition at line 276 of file DH_Link.cpp. References a, AddObject(), alpha, ObjectBase::Clone(), d, LinkBase::DeSerialize(), IfstreamWithComments::eatwhite(), frame, GetAbsoluteFileName(), IfstreamWithComments::getline(), VRML_Reader::GetTheObject(), IfstreamWithComments::path, VRML_20_Reader::Read(), SetControllingParameter(), VRML_Reader::SetFilename(), Entity::SetName(), theta, MPKstring::TrimLeadingWhitespace(), MPKstring::TrimTrailingWhitespace(), and type. Referenced by operator>>(). Here is the call graph for this function: 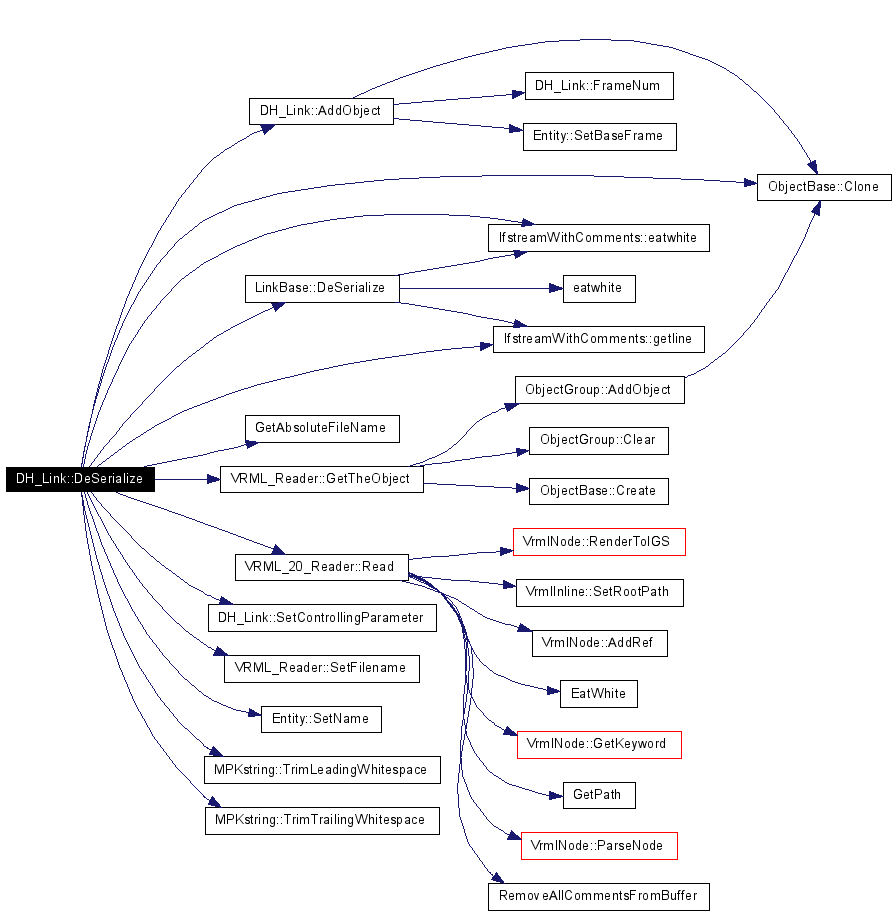 |
|
|
Implements LinkBase. Definition at line 247 of file DH_Link.cpp. References frame. |
|
|
Definition at line 161 of file DH_Link.cpp. References frame. Referenced by AddObject(), DH_Link(), and CRedundant::GetDesireFrameByConfiguration(). |
|
|
Definition at line 108 of file DH_Link.h. References a. Referenced by CPassive::ResolveJoints(). |
|
|
Definition at line 110 of file DH_Link.h. References alpha. Referenced by CPassive::ResolveJoints(). |
|
|
Definition at line 109 of file DH_Link.h. References d. Referenced by CPassive::ResolveJoints(). |
|
|
Definition at line 390 of file DH_Link.cpp. References a, alpha, CosDeg(), d, frame, SinDeg(), and theta. Here is the call graph for this function: 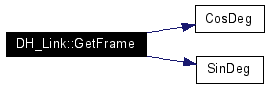 |
|
|
Definition at line 351 of file DH_Link.cpp. References a, alpha, CosDeg(), d, SinDeg(), and theta. Referenced by CPassive::ResolveJoints(). Here is the call graph for this function: 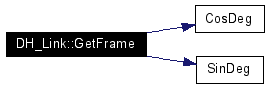 |
|
|
Definition at line 339 of file DH_Link.cpp. References type. Referenced by CPassive::Inverse(). |
|
|
Definition at line 344 of file DH_Link.cpp. References q. |
|
|
Definition at line 111 of file DH_Link.h. References theta. Referenced by CPassive::ResolveJoints(). |
|
|
Reimplemented from LinkBase. Definition at line 258 of file DH_Link.cpp. |
|
|
Definition at line 182 of file DH_Link.cpp. References a. |
|
|
Definition at line 175 of file DH_Link.cpp. References alpha. |
|
|
Definition at line 203 of file DH_Link.cpp. References a, alpha, d, DH_A, DH_ALPHA, DH_D, DH_THETA, q, theta, and type. Referenced by DeSerialize(). |
|
|
Definition at line 189 of file DH_Link.cpp. References d. |
|
|
Implements LinkBase. Definition at line 238 of file DH_Link.cpp. References q. Referenced by CPassive::ResolveJoints(). |
|
|
Definition at line 196 of file DH_Link.cpp. References theta. |
|
|
Implements LinkBase. Definition at line 122 of file DH_Link.cpp. References a, alpha, CosDeg(), d, frame, LinkBase::frameManager, FrameManager::GetFrameRef(), FrameManager::MarkAllFramesChanged(), Matrix4x4::SetValues(), SinDeg(), and theta. Here is the call graph for this function: 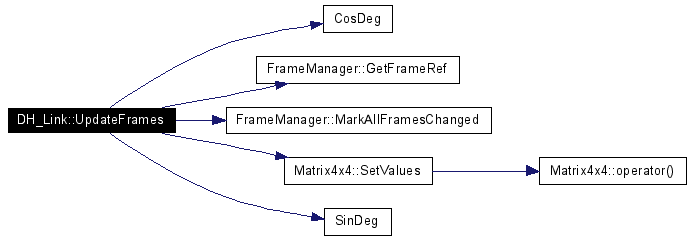 |
|
||||||||||||
|
Definition at line 426 of file DH_Link.cpp. |
|
||||||||||||
|
|
|
|
Definition at line 175 of file DH_Link.h. Referenced by DeSerialize(), DH_Link(), GetA(), GetFrame(), operator<<(), SetA(), SetControllingParameter(), and UpdateFrames(). |
|
|
Definition at line 170 of file DH_Link.h. Referenced by DeSerialize(), DH_Link(), GetAlpha(), GetFrame(), operator<<(), SetAlpha(), SetControllingParameter(), and UpdateFrames(). |
|
|
Definition at line 180 of file DH_Link.h. Referenced by DeSerialize(), DH_Link(), GetD(), GetFrame(), operator<<(), SetControllingParameter(), SetD(), and UpdateFrames(). |
|
|
Definition at line 165 of file DH_Link.h. Referenced by DeSerialize(), DH_Link(), DoesLinkControlFrame(), FrameNum(), GetFrame(), operator<<(), and UpdateFrames(). |
|
|
Definition at line 190 of file DH_Link.h. Referenced by DH_Link(), GetJointVariable(), SetControllingParameter(), SetJointVariable(), and ~DH_Link(). |
|
|
Definition at line 185 of file DH_Link.h. Referenced by DeSerialize(), DH_Link(), GetFrame(), GetTheta(), operator<<(), SetControllingParameter(), SetTheta(), and UpdateFrames(). |
|
|
Definition at line 195 of file DH_Link.h. Referenced by DeSerialize(), GetJointType(), operator<<(), and SetControllingParameter(). |
 1.4.6-NO
1.4.6-NO