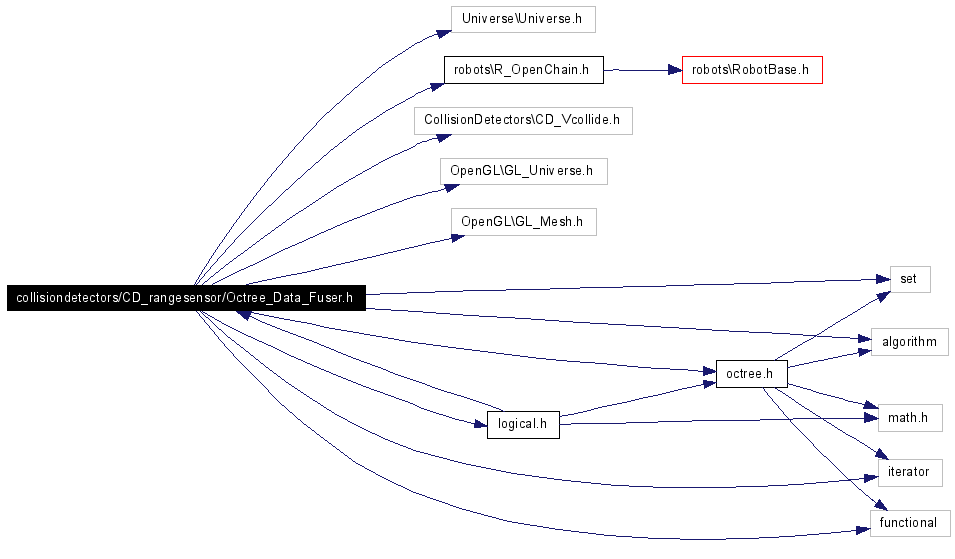
#include "Universe\Universe.h"#include "robots\R_OpenChain.h"#include "CollisionDetectors\CD_Vcollide.h"#include "OpenGL\GL_Universe.h"#include "OpenGL\GL_Mesh.h"#include "logical.h"#include "octree.h"#include <set>#include <algorithm>#include <iterator>#include <functional>Include dependency graph for Octree_Data_Fuser.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Octree_Data_Fuser |
Defines | |
| #define | Octree_Data_Fuser_h 1 |
Variables | |
| const int | octree_nodisplay = 0 |
| const int | octree_whitedisplay = 1 |
| const int | octree_blackdisplay = 2 |
| const int | octree_obstacledisplay = 3 |
|
|
Definition at line 2 of file Octree_Data_Fuser.h. |
|
|
Definition at line 22 of file Octree_Data_Fuser.h. |
|
|
Definition at line 20 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(). |
|
|
Definition at line 23 of file Octree_Data_Fuser.h. Referenced by Octree_Data_Fuser::Convert(). |
|
|
Definition at line 21 of file Octree_Data_Fuser.h. Referenced by Octree_Data_Fuser::Octree_Data_Fuser(). |
 1.4.6-NO
1.4.6-NO