#include <collisiondetectors/CD_rangesensor/Octree_Data_Fuser.h>
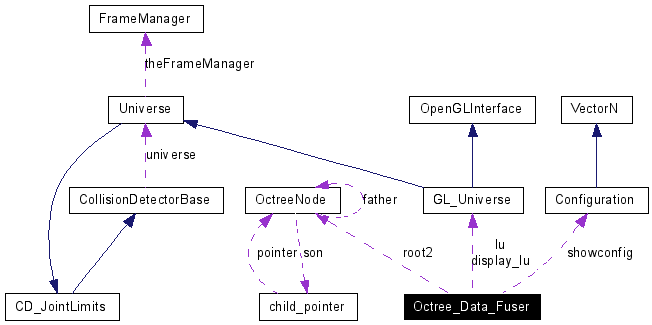
Collaboration diagram for Octree_Data_Fuser:
Public Member Functions | |
| Octree_Data_Fuser () | |
| Octree_Data_Fuser (const Octree_Data_Fuser &right) | |
| ~Octree_Data_Fuser () | |
| void | Save_State (const char *filename) |
| void | Load_State (const char *filename) |
| void | Add_Block (cubic worldextents, cubic newblocksize) |
| void | Convert (CD_Vcollide *&lv_free, CD_Vcollide *&lv_obstacle, Universe &robot_universe, bool valid_config) |
| void | Update (Range_Sensor *camera) |
| void | GL_Display_Octree () |
Public Attributes | |
| int | maxlevel |
| int | octree_display_mode |
| bool | track_sensed_obstacles |
| int | expected_vertexes |
| int | expected_facets |
| int | expected_squarevectors |
| double | scalefactor |
| Configuration | showconfig |
Protected Member Functions | |
| void | new_local_universe (Universe &robot_universe) |
Protected Attributes | |
| std::set< PointClass > | obstacle_points |
| GL_Universe * | lu |
| GL_Universe * | display_lu |
| OctreeNode * | root2 |
Definition at line 26 of file Octree_Data_Fuser.h.
|
|
Definition at line 9 of file Octree_Data_Fuser.cpp. References BLACK, create_node(), display_lu, expected_facets, expected_squarevectors, expected_vertexes, OctreeNode::father, lu, maxlevel, obstacle_points, octree_display_mode, octree_whitedisplay, root2, scalefactor, and track_sensed_obstacles. Here is the call graph for this function:  |
|
|
Definition at line 28 of file Octree_Data_Fuser.cpp. References Universe::Clone(), copy(), display_lu, expected_facets, expected_squarevectors, expected_vertexes, lu, maxlevel, obstacle_points, octree_display_mode, root2, scalefactor, and track_sensed_obstacles. Here is the call graph for this function:  |
|
|
Definition at line 52 of file Octree_Data_Fuser.cpp. References delete_node(), display_lu, and root2. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 96 of file Octree_Data_Fuser.cpp. References create_block_node(), delete_node(), OctreeNode::father, maxlevel, root2, and union_node(). Referenced by CD_Range_Sensor::CD_Range_Sensor(). Here is the call graph for this function: 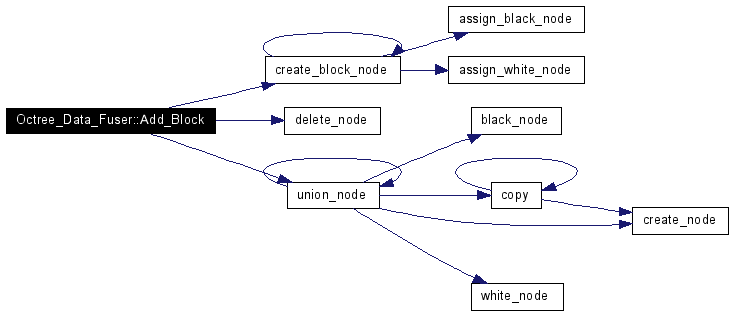 |
|
||||||||||||||||||||
|
Definition at line 245 of file Octree_Data_Fuser.cpp. References Universe::AddEntity(), calc_cube_facets(), display_lu, expected_facets, expected_squarevectors, expected_vertexes, extract_cubes_set(), Universe::GetFrameManager(), Mesh::GetVertexes(), lu, maxlevel, new_local_universe(), obstacle_points, octree_display_mode, octree_obstacledisplay, scalefactor, Universe::SetConfiguration(), Entity::SetName(), showconfig, track_sensed_obstacles, cubic_d::x0, cubic_d::x1, cubic_d::y0, cubic_d::y1, cubic_d::z0, and cubic_d::z1. Here is the call graph for this function: 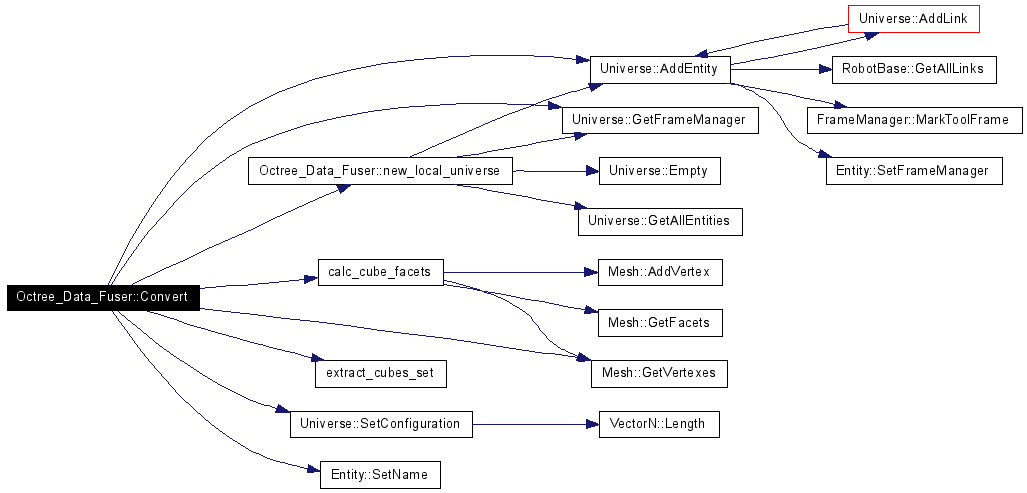 |
|
|
Definition at line 142 of file Octree_Data_Fuser.cpp. References display_lu, GL_Universe::GLDraw(), GL_Material::GLDraw(), GL_Material::matGreenPlastic, and GL_Material::SetTransparancy(). Referenced by PL_Range_Sensor::DrawExplicit(). Here is the call graph for this function: 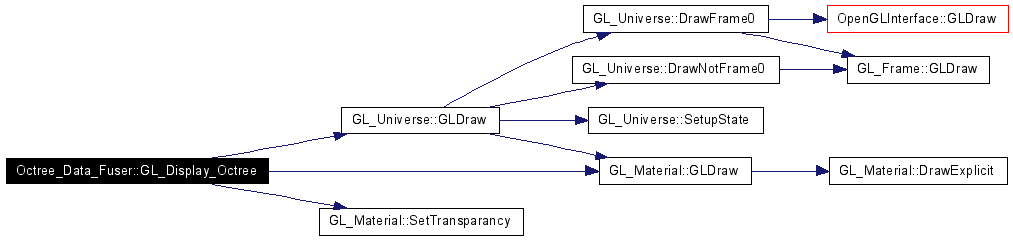 |
|
|
Definition at line 124 of file Octree_Data_Fuser.cpp. References delete_node(), OctreeNode::father, read_node(), reset_bitbuckets(), and root2. Referenced by CD_Range_Sensor::CD_Range_Sensor(). Here is the call graph for this function: 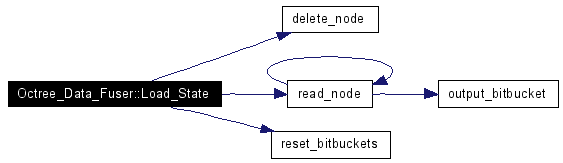 |
|
|
Definition at line 65 of file Octree_Data_Fuser.cpp. References Universe::AddEntity(), Universe::Empty(), Universe::GetAllEntities(), Universe::GetFrameManager(), and lu. Referenced by Convert(). Here is the call graph for this function: 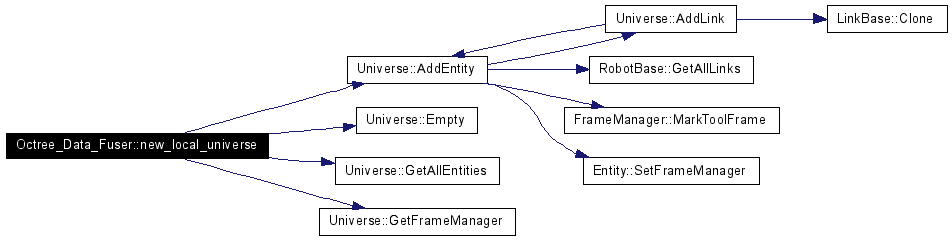 |
|
|
Definition at line 108 of file Octree_Data_Fuser.cpp. References reset_bitbuckets(), root2, and save_node(). Here is the call graph for this function: 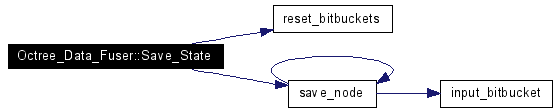 |
|
|
Definition at line 190 of file Octree_Data_Fuser.cpp. References Range_Sensor::ray_coord_map, and scalefactor. |
|
|
Definition at line 78 of file Octree_Data_Fuser.h. Referenced by Convert(), GL_Display_Octree(), Octree_Data_Fuser(), and ~Octree_Data_Fuser(). |
|
|
Definition at line 44 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 45 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 43 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 76 of file Octree_Data_Fuser.h. Referenced by Convert(), new_local_universe(), and Octree_Data_Fuser(). |
|
|
Definition at line 40 of file Octree_Data_Fuser.h. Referenced by Add_Block(), CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 74 of file Octree_Data_Fuser.h. Referenced by Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 41 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
|
|
Definition at line 80 of file Octree_Data_Fuser.h. Referenced by Add_Block(), Load_State(), Octree_Data_Fuser(), Save_State(), and ~Octree_Data_Fuser(). |
|
|
Definition at line 46 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), Octree_Data_Fuser(), and Update(). |
|
|
Definition at line 48 of file Octree_Data_Fuser.h. Referenced by Convert(). |
|
|
Definition at line 42 of file Octree_Data_Fuser.h. Referenced by CD_Range_Sensor::CD_Range_Sensor(), Convert(), and Octree_Data_Fuser(). |
 1.4.6-NO
1.4.6-NO