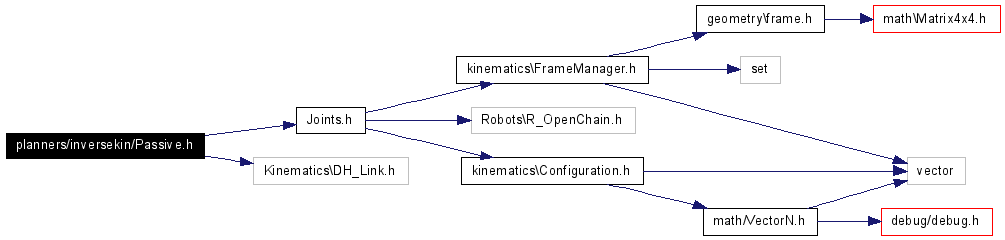
#include "Joints.h"#include "Kinematics\DH_Link.h"Include dependency graph for Passive.h:
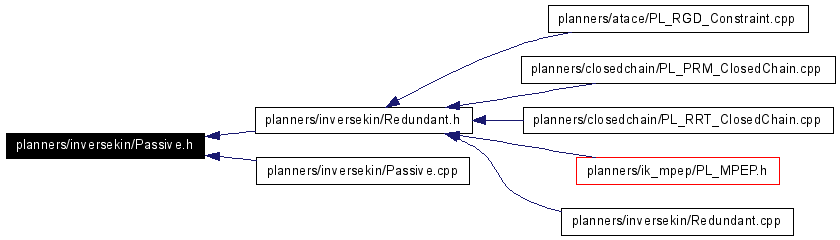
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | CPassive |
Defines | |
| #define | MAX_SOLUTION 4 |
|
|
Definition at line 12 of file Passive.h. Referenced by CPassive::CPassive(), and CPassive::SetLastJoint(). |
 1.4.6-NO
1.4.6-NO