#include <planners/inversekin/Passive.h>
Inherits CJoints.
Inheritance diagram for CPassive:
Public Member Functions | |
| CPassive () | |
| CPassive (FrameManager *frameManager) | |
| virtual | ~CPassive () |
| virtual void | SetRobot (R_OpenChain *robot) |
| virtual void | SetLastJoint (unsigned int joint) |
| virtual void | SetEndEffectFrame (Frame &frame) |
| virtual void | SetDesireEndEffect (Frame &frame) |
| virtual void | SetFirstFrame (Frame &frame) |
| virtual bool | GetRandomConfiguration (Configuration &conf) |
| virtual bool | GetConfiguration (Configuration &conf) |
| virtual bool | GetConfiguration (Configuration &conf, Configuration ¤t) |
| virtual bool | GetConfiguration (Configuration &conf, Configuration ¤t, double dist) |
Protected Attributes | |
| Frame | firstFrame |
| Frame | effectFrame |
| Frame | desireEffect |
Private Member Functions | |
| bool | ResolveJoints (DH_Parameter type) |
| bool | ResolveJoints (DH_Parameter type1, DH_Parameter type2) |
| bool | ResolveJoints (DH_Parameter type1, DH_Parameter type2, DH_Parameter type3) |
| bool | Inverse () |
| bool __inline | Solution (double a, double b, double c, double solution[2], int &num) |
| bool __inline | Solution (double a, double b, double c, double d, double &solution) |
| bool __inline | Solution (Frame &rotated, double &solution) |
Private Attributes | |
| Configuration * | solution |
| int | solutionNum |
Definition at line 14 of file Passive.h.
|
|
Definition at line 47 of file Passive.cpp. References MAX_SOLUTION, and solution. |
|
|
Definition at line 52 of file Passive.cpp. References MAX_SOLUTION, and solution. |
|
|
Definition at line 58 of file Passive.cpp. References solution. |
|
||||||||||||||||
|
Implements CJoints. Definition at line 235 of file Passive.cpp. References CJoints::Distance(), CJoints::firstJoint, Inverse(), CJoints::jointNum, CJoints::links, VectorN::SetLength(), solution, and solutionNum. Here is the call graph for this function: 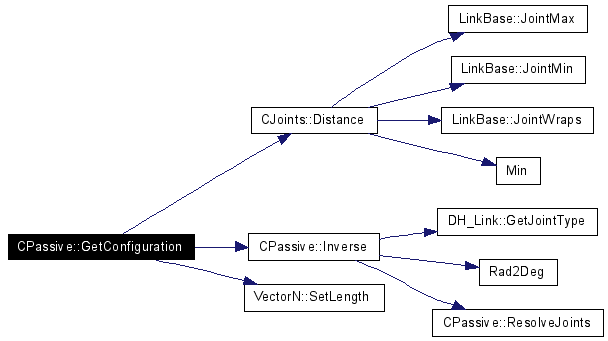 |
|
||||||||||||
|
Definition at line 290 of file Passive.cpp. References CJoints::Distance(), CJoints::firstJoint, Inverse(), CJoints::jointNum, CJoints::links, VectorN::SetLength(), and solution. Here is the call graph for this function: 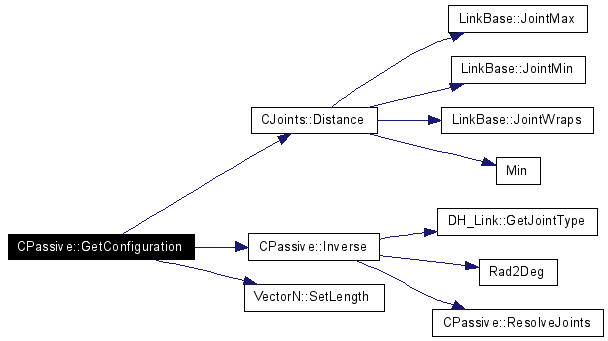 |
|
|
Implements CJoints. Definition at line 203 of file Passive.cpp. References Inverse(), CJoints::jointNum, VectorN::SetLength(), solution, and solutionNum. Referenced by CRedundant::GetRandomConfiguration(). Here is the call graph for this function:  |
|
|
Definition at line 161 of file Passive.cpp. References CJoints::firstJoint, CJoints::jointNum, CJoints::links, and VectorN::SetLength(). Referenced by CRedundant::GetRandomConfiguration(). Here is the call graph for this function:  |
|
|
Definition at line 877 of file Passive.cpp. References DH_A, DH_ALPHA, CJoints::firstJoint, DH_Link::GetJointType(), CJoints::jointNum, CJoints::links, Rad2Deg(), ResolveJoints(), and solution. Referenced by GetConfiguration(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 676 of file Passive.cpp. References desireEffect, DH_THETA, effectFrame, firstFrame, CJoints::firstJoint, DH_Link::GetA(), DH_Link::GetAlpha(), DH_Link::GetD(), DH_Link::GetFrame(), DH_Link::GetTheta(), Matrix4x4::Inverse(), IsZero, CJoints::links, Log(), M_PI, Rad2Deg(), DH_Link::SetJointVariable(), Solution(), and solution. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 372 of file Passive.cpp. References desireEffect, DH_THETA, effectFrame, firstFrame, CJoints::firstJoint, DH_Link::GetA(), DH_Link::GetAlpha(), DH_Link::GetD(), DH_Link::GetTheta(), Matrix4x4::Inverse(), IsZero, CJoints::links, M_PI, Solution(), and solution. Here is the call graph for this function:  |
|
|
Definition at line 353 of file Passive.cpp. Referenced by Inverse(). |
|
|
Definition at line 125 of file Passive.cpp. References desireEffect, and Matrix4x4::SetValues(). Referenced by CRedundant::GetConfigurationByActive(), and CRedundant::GetRandomConfiguration(). Here is the call graph for this function:  |
|
|
Definition at line 106 of file Passive.cpp. References effectFrame, and Matrix4x4::SetValues(). Here is the call graph for this function:  |
|
|
Definition at line 143 of file Passive.cpp. References firstFrame, and Matrix4x4::SetValues(). Here is the call graph for this function:  |
|
|
Reimplemented from CJoints. Definition at line 84 of file Passive.cpp. References CJoints::jointNum, MAX_SOLUTION, CJoints::SetLastJoint(), and solution. Referenced by CRedundant::SetPassiveLastJoint(). Here is the call graph for this function:  |
|
|
Reimplemented from CJoints. Definition at line 69 of file Passive.cpp. References effectFrame, CJoints::frameManager, FrameManager::GetFrameRef(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), CJoints::robot, CJoints::SetRobot(), and Matrix4x4::SetValues(). Referenced by CRedundant::SetCollisionDetector(). Here is the call graph for this function: 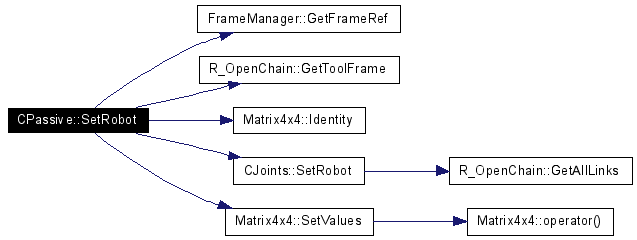 |
|
||||||||||||
|
Definition at line 1029 of file Passive.cpp. References ROUNDING_ERROR, and Matrix4x4::values. |
|
||||||||||||||||||||||||
|
Definition at line 1003 of file Passive.cpp. |
|
||||||||||||||||||||||||
|
Definition at line 958 of file Passive.cpp. References M_PI. Referenced by ResolveJoints(). |
|
|
Definition at line 45 of file Passive.h. Referenced by ResolveJoints(), and SetDesireEndEffect(). |
|
|
Definition at line 44 of file Passive.h. Referenced by ResolveJoints(), SetEndEffectFrame(), and SetRobot(). |
|
|
Definition at line 43 of file Passive.h. Referenced by ResolveJoints(), and SetFirstFrame(). |
|
|
Definition at line 48 of file Passive.h. Referenced by CPassive(), GetConfiguration(), Inverse(), ResolveJoints(), SetLastJoint(), and ~CPassive(). |
|
|
Definition at line 49 of file Passive.h. Referenced by GetConfiguration(). |
 1.4.6-NO
1.4.6-NO