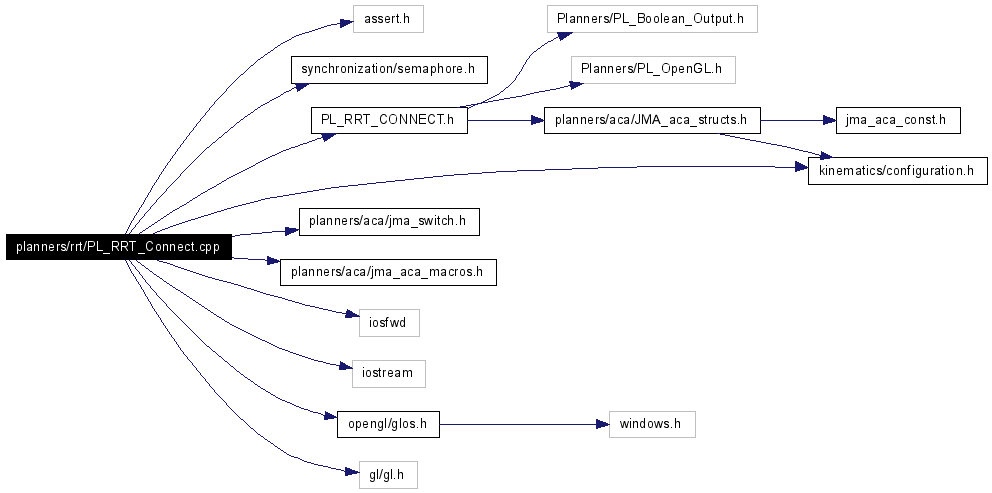
#include <assert.h>#include "synchronization/semaphore.h"#include "PL_RRT_CONNECT.h"#include "planners/aca/jma_switch.h"#include "planners/aca/jma_aca_macros.h"#include <iosfwd>#include <iostream>#include "kinematics/configuration.h"#include "opengl/glos.h"#include <gl/gl.h>Include dependency graph for PL_RRT_Connect.cpp:
Go to the source code of this file.
Defines | |
| #define | THICKNESS 3 |
| #define | WIN_WIDTH 1000 |
| #define | WIN_HEIGHT 500 |
| #define | EPSILON 1.0e-3 |
| #define | BIG_NUMBER 1.0e+37 |
| #define | STEP_SIZE (5*collisionDetector->DOF()) |
|
|
Definition at line 17 of file PL_RRT_Connect.cpp. |
|
|
Definition at line 16 of file PL_RRT_Connect.cpp. |
|
|
Definition at line 18 of file PL_RRT_Connect.cpp. Referenced by PL_RRT_CONNECT::Get_new_config(). |
|
|
Definition at line 13 of file PL_RRT_Connect.cpp. |
|
|
Definition at line 15 of file PL_RRT_Connect.cpp. |
|
|
Definition at line 14 of file PL_RRT_Connect.cpp. |
 1.4.6-NO
1.4.6-NO