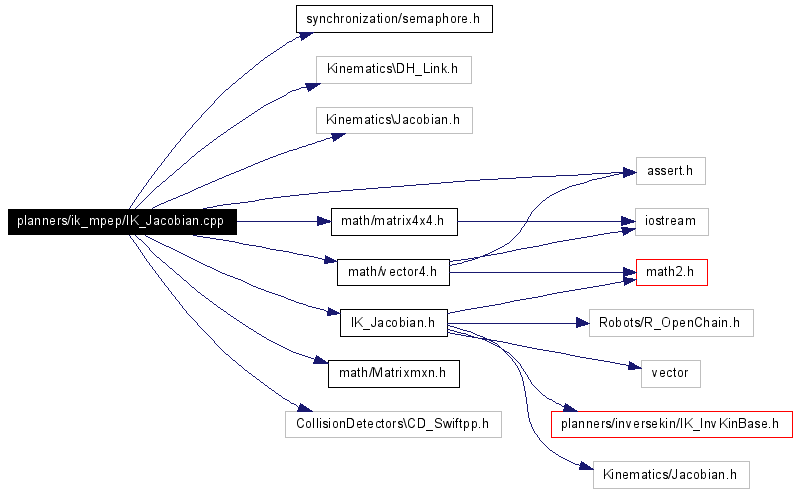
#include "synchronization/semaphore.h"#include "Kinematics\DH_Link.h"#include "Kinematics\Jacobian.h"#include "assert.h"#include <math/matrix4x4.h>#include <math/Matrixmxn.h>#include <math/vector4.h>#include "CollisionDetectors\CD_Swiftpp.h"#include "IK_Jacobian.h"Include dependency graph for IK_Jacobian.cpp:
Go to the source code of this file.
Defines | |
| #define | LogMatrix(a, b, c) |
| #define | LogVector(a, b, c) |
| #define | LogMessage(a, b) |
Variables | |
| static const int | FRAMEDOF = 6 |
| static const int | SAMPLING_PERIOD = 1 |
| static const double | INFINITY = LONG_MAX |
| static const double | DEFAULT_OBS_TOL = 0.01 |
| static const double | DEFAULT_PATH_TOL = 0.5 |
| static const double | DEFAULT_ANG_TOL = 2 |
| static const double | DEFAULT_VEL = 1 |
| static const double | DEFAULT_OBS_GAIN = 0.1 |
| static const double | DEFAULT_REL_IMP = 1 |
| static const double | MAX_OBS_VEL = 0.5 |
| static const double | MAX_JOINT_VEL = (M_PI/10.) |
| static const double | CALCULATION_FREQ = 100 |
| static const double | UNITY_GAIN_DISTANCE = 0.5 |
| static const double | SOI_GAIN_DISTANCE = 1.5 |
| static const double | DEFAULT_HOMO_GAIN = 0.25 |
|
|
Definition at line 17 of file IK_Jacobian.cpp. |
|
|
Definition at line 19 of file IK_Jacobian.cpp. |
|
|
Definition at line 18 of file IK_Jacobian.cpp. |
|
|
Definition at line 41 of file IK_Jacobian.cpp. |
|
|
Definition at line 30 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::IK_Jacobian(). |
|
|
Definition at line 44 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::IK_Jacobian(). |
|
|
Definition at line 34 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::IK_Jacobian(). |
|
|
Definition at line 26 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::IK_Jacobian(). |
|
|
Definition at line 28 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::IK_Jacobian(). |
|
|
Definition at line 36 of file IK_Jacobian.cpp. |
|
|
Definition at line 32 of file IK_Jacobian.cpp. |
|
|
Definition at line 22 of file IK_Jacobian.cpp. Referenced by IK_InvKinBase::GetGoalFrameVector(), IK_InvKinBase::GetRotVector(), IK_InvKinBase::GetTransformFrame(), IK_Jacobian::IK_Jacobian(), and IK_InvKinBase::SetGoalFrame(). |
|
|
Definition at line 25 of file IK_Jacobian.cpp. |
|
|
Definition at line 40 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::CheckJointVelocities(). |
|
|
Definition at line 39 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::ComputeHomogeneousTerm(). |
|
|
Definition at line 23 of file IK_Jacobian.cpp. |
|
|
Definition at line 43 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::ComputeHomogeneousTerm(). |
|
|
Definition at line 42 of file IK_Jacobian.cpp. Referenced by IK_Jacobian::ComputeHomogeneousTerm(). |
 1.4.6-NO
1.4.6-NO