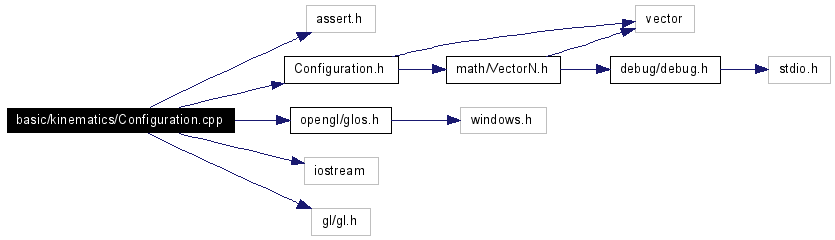
#include <assert.h>#include "Configuration.h"#include "opengl/glos.h"#include <iostream>#include <gl/gl.h>Include dependency graph for Configuration.cpp:
Go to the source code of this file.
Functions | |
| ostream & | operator<< (ostream &os, const Configuration &v) |
| istream & | operator>> (istream &is, Configuration &v) |
|
||||||||||||
|
Definition at line 147 of file Configuration.cpp. |
|
||||||||||||
|
Definition at line 153 of file Configuration.cpp. |
 1.4.6-NO
1.4.6-NO