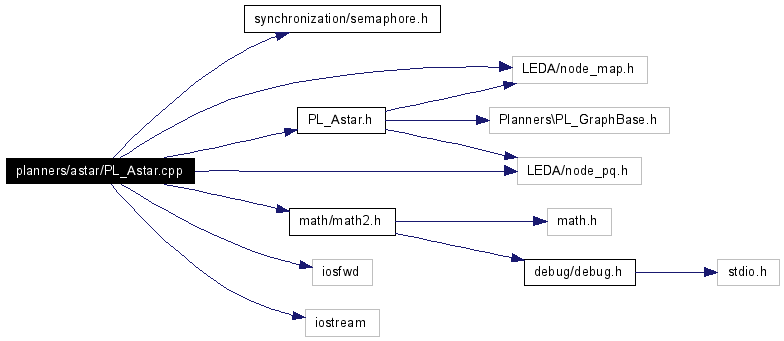
#include "synchronization/semaphore.h"#include "PL_Astar.h"#include <LEDA/node_map.h>#include <LEDA/node_pq.h>#include "math/math2.h"#include <iosfwd>#include <iostream>Include dependency graph for PL_Astar.cpp:
Go to the source code of this file.
Variables | |
| const int | DEFAULTNUMSTEPS = 40 |
| const double | DEFAULTWEIGHT = 0.9 |
| const double | COMPTOL = 1e-8 |
| static const char | FILEEXT [] = ".a8" |
| static const char | FILEHEADER [] = "PL_ASTAR" |
|
|
Definition at line 28 of file PL_Astar.cpp. Referenced by PL_GraphBase::FindConfig(), PL_Astar::SetGoalConfig(), and PL_Astar::SetStartConfig(). |
|
|
Definition at line 26 of file PL_Astar.cpp. Referenced by PL_Astar::SetDefaultStepSize(). |
|
|
Definition at line 27 of file PL_Astar.cpp. Referenced by PL_Astar::PL_Astar(). |
|
|
Definition at line 30 of file PL_Astar.cpp. Referenced by IK_ACA::IK_ACA(), PL_Astar::PL_Astar(), PL_GraphBase::PL_GraphBase(), and PL_PRM::PL_PRM(). |
|
|
Definition at line 31 of file PL_Astar.cpp. Referenced by IK_ACA::IK_ACA(), PL_Astar::PL_Astar(), PL_GraphBase::PL_GraphBase(), and PL_PRM::PL_PRM(). |
 1.4.6-NO
1.4.6-NO