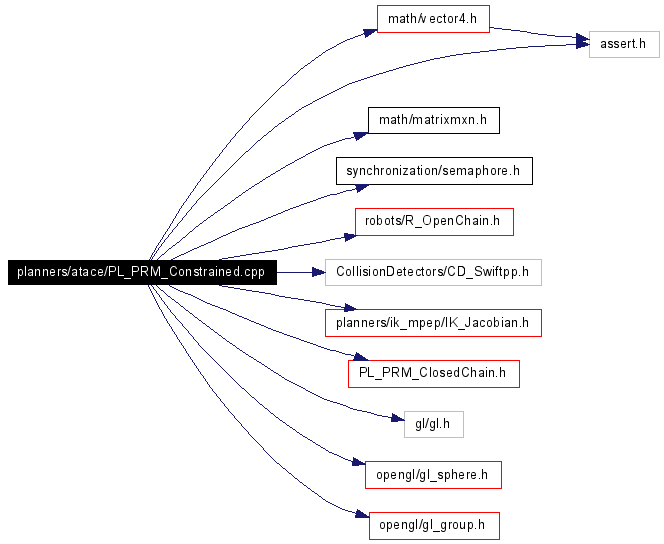
#include "math/vector4.h"#include "math/matrixmxn.h"#include "synchronization/semaphore.h"#include "robots/R_OpenChain.h"#include "CollisionDetectors/CD_Swiftpp.h"#include <assert.h>#include "planners/ik_mpep/IK_Jacobian.h"#include "PL_PRM_ClosedChain.h"#include <gl/gl.h>#include <opengl/gl_sphere.h>#include <opengl/gl_group.h>Include dependency graph for PL_PRM_Constrained.cpp:
Go to the source code of this file.
Defines | |
| #define | MAX_ITERATION 30 |
| #define | MAX_RETRY 30 |
| #define | MAX_RETRY2 30 |
| #define | DEF_NEIGHBOR (2) |
| #define | DEF_DIST_TOLERANCE (3) |
| #define | DEF_ERR_TOLERANCE (1e-3) |
Variables | |
| double(PL_PRM_ClosedChain::* | costFunc )(const Configuration &p1, const Frame &pose) const = &PL_PRM_ClosedChain::Error1 |
|
|
Definition at line 18 of file PL_PRM_Constrained.cpp. Referenced by PL_RRT_ClosedChain::ConnectToGoalJacobian(), PL_RGD_PRM::IsInterfering(), PL_PRM_ClosedChain::IsInterfering(), PL_RRT_ClosedChain::TestJacobianConnection(), and PL_RRT_ClosedChain::TestRGDConnection(). |
|
|
|
|
|
|
Definition at line 16 of file PL_PRM_Constrained.cpp. Referenced by PL_PRM_ClosedRGD::IsInterfering(), PL_RGD_PRM::IsInterfering(), PL_PRM_ClosedChain::IsInterfering(), and PL_RRT_ClosedChain::TestRGDConnection(). |
|
 1.4.6-NO
1.4.6-NO