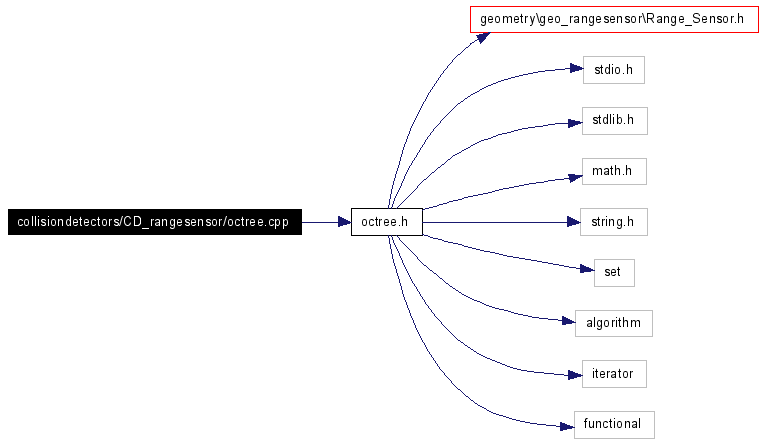
#include "octree.h"Include dependency graph for octree.cpp:
Go to the source code of this file.
Defines | |
| #define | GET_REP(a, point, Side) |
Functions | |
| OctreeNode * | assign_white_node () |
| OctreeNode * | assign_black_node () |
| OctreeNode * | assign_gray_node (struct free_space *a, struct cubic *c, int level, int maxlevel) |
| void | mapping (struct free_space *a, struct vector_d *point, int proj_point[3]) |
| OctreeNode * | construct_octree (struct free_space *a, struct cubic *scope, int level, int maxlevel) |
| void | scale_distance_assign (int proj_p[3], int i, int j, struct free_space *a, Range_Sensor *camera) |
| void | calculate_scaled_distance (struct free_space *a, Range_Sensor *camera) |
Variables | |
| int | last_face = -1 |
|
|
Value: \
{\
switch(Side) \
{ \
case 0: \
rep = point.z - a->apex.z; \
break; \
case 1: \
rep = -point.z + a->apex.z; \
break; \
case 2: \
rep = point.y - a->apex.y; \
break; \
case 3: \
rep = -point.y + a->apex.y; \
break; \
case 4: \
rep = point.x - a->apex.x; \
break; \
case 5: \
rep = -point.x + a->apex.x; \
break; \
default: \
exit(51); \
break; \
} \
};
Definition at line 11 of file octree.cpp. Referenced by construct_octree(). |
|
|
Definition at line 62 of file octree.cpp. References BLACK, OctreeNode::color, and OctreeNode::son. Referenced by construct_octree(), and create_block_node(). |
|
||||||||||||||||||||
|
Definition at line 82 of file octree.cpp. References OctreeNode::color, construct_octree(), OctreeNode::father, GRAY, child_pointer::pointer, OctreeNode::son, cubic::x0, cubic::x1, cubic::y0, cubic::y1, cubic::z0, and cubic::z1. Referenced by construct_octree(). Here is the call graph for this function: 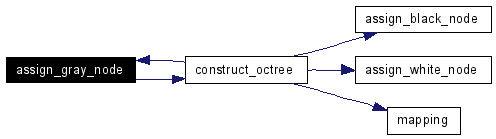 |
|
|
Definition at line 43 of file octree.cpp. References OctreeNode::color, OctreeNode::son, and WHITE. Referenced by construct_octree(), and create_block_node(). |
|
||||||||||||
|
Definition at line 651 of file octree.cpp. References free_space::apex, mapping(), Range_Sensor::ray_coord_map, scale_distance_assign(), free_space::scaled_distance, vector_d::x, vector_d::y, and vector_d::z. Referenced by construct_octree_wrapper(). Here is the call graph for this function: 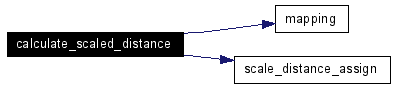 |
|
||||||||||||||||||||
|
Definition at line 415 of file octree.cpp. References free_space::apex, assign_black_node(), assign_gray_node(), assign_white_node(), free_space::bound_end, GET_REP, INSIDE, LIMIT, mapping(), OUTSIDE, free_space::scaled_distance, vector_d::x, cubic::x0, cubic::x1, vector_d::y, cubic::y0, cubic::y1, vector_d::z, cubic::z0, and cubic::z1. Referenced by assign_gray_node(), and construct_octree_wrapper(). Here is the call graph for this function: 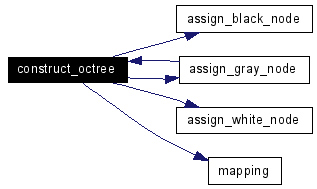 |
|
||||||||||||||||
|
Definition at line 170 of file octree.cpp. References free_space::apex, DBL_LIMIT, DBL_LIMITP, last_face, LIMIT, LIMITP, TEMP_EPSILON, vector_d::x, vector_d::y, and vector_d::z. Referenced by calculate_scaled_distance(), and construct_octree(). |
|
||||||||||||||||||||||||
|
Definition at line 616 of file octree.cpp. References free_space::apex, Range_Sensor::ray_coord_map, free_space::scaled_distance, vector_d::x, vector_d::y, and vector_d::z. Referenced by calculate_scaled_distance(). |
|
|
Definition at line 40 of file octree.cpp. Referenced by mapping(). |
 1.4.6-NO
1.4.6-NO