#include <basic/geometry/geo_rangesensor/Range_Sensor.h>
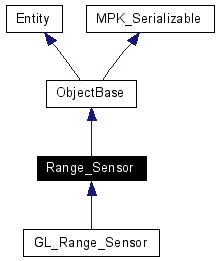
Inherits ObjectBase.
Inherited by GL_Range_Sensor.
Inheritance diagram for Range_Sensor:
Definition at line 34 of file Range_Sensor.h.
|
|
Definition at line 25 of file Range_Sensor.cpp. References absFrame, amDisplayingBitmap, angle, bp, DisplayingBitmapEnabled, Entity::GetTransform(), lower_ray_lim_y, lower_ray_lim_z, maxerror, maxrange, RAY_ARRAY_LIMIT, ray_half_limit, ObjectBase::theFrame, upper_ray_lim_y, upper_ray_lim_z, user_ray_range_y, and user_ray_range_z. Referenced by Clone(). Here is the call graph for this function:  |
|
|
Definition at line 55 of file Range_Sensor.cpp. References absFrame, amDisplayingBitmap, angle, DisplayingBitmapEnabled, Entity::GetTransform(), lower_ray_lim_y, lower_ray_lim_z, maxerror, maxrange, RAY_ARRAY_LIMIT, ray_half_limit, ObjectBase::theFrame, upper_ray_lim_y, upper_ray_lim_z, user_ray_range_y, and user_ray_range_z. Here is the call graph for this function:  |
|
|
Definition at line 86 of file Range_Sensor.cpp. References amDisplayingBitmap, and bp. |
|
|
Definition at line 593 of file Range_Sensor.cpp. References MgcBox3::Axis(), MgcBox3::Center(), MgcRay3::Direction(), MgcBox3::Extent(), Entity::GetTransform(), MPK_Box::Height(), MPK_Box::Length(), lower_ray_lim_y, lower_ray_lim_z, MgcFindIntersection(), MgcTestIntersection(), MgcRay3::Origin(), ray_array, ray_depth_map, ray_source, ObjectBase::theFrame, theFrustum, ray_array_space::values, Matrix4x4::values, MPK_Box::Width(), MgcVector3::x, MgcVector3::y, and MgcVector3::z. Referenced by AddEntityToDepthMap(). Here is the call graph for this function: 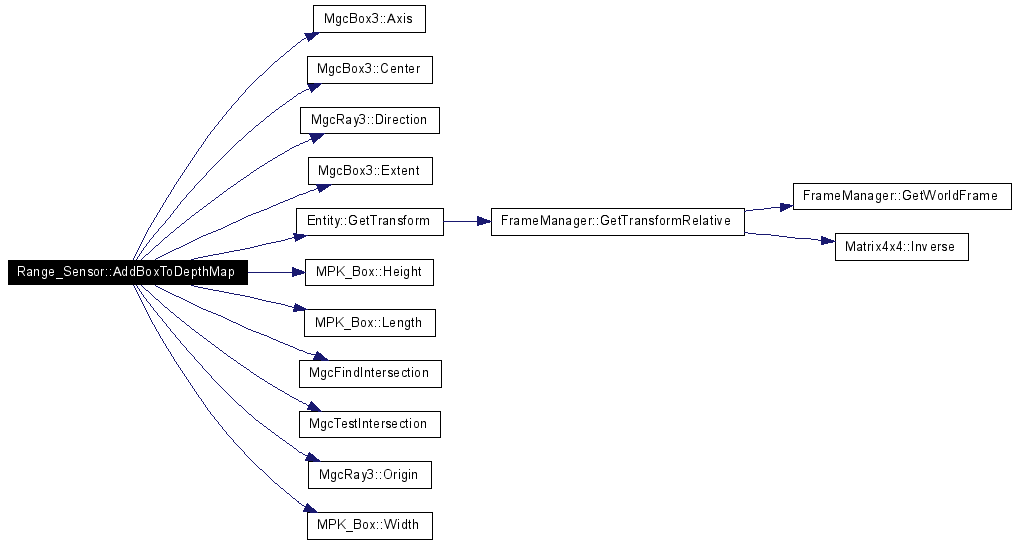 |
|
|
Definition at line 419 of file Range_Sensor.cpp. References MgcBox3::Axis(), MgcCylinder::Center(), MgcBox3::Center(), MgcRay3::Direction(), MgcCylinder::Direction(), MgcBox3::Extent(), Entity::GetTransform(), MgcCylinder::Height(), MPK_Cylinder::Height(), lower_ray_lim_y, lower_ray_lim_z, MgcFindIntersection(), MgcTestIntersection(), normalize(), MgcRay3::Origin(), MgcCylinder::Radius(), MPK_Cylinder::Radius(), ray_array, ray_depth_map, ray_source, ObjectBase::theFrame, theFrustum, ray_array_space::values, Matrix4x4::values, MgcVector3::x, MgcVector3::y, and MgcVector3::z. Referenced by AddEntityToDepthMap(). Here is the call graph for this function: 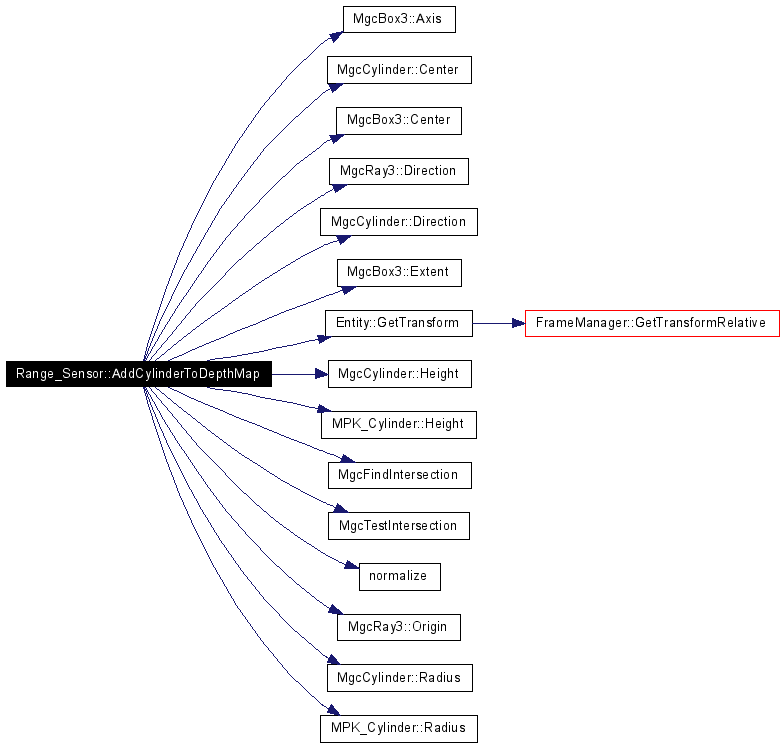 |
|
|
Definition at line 272 of file Range_Sensor.cpp. References AddBoxToDepthMap(), AddCylinderToDepthMap(), AddMeshToDepthMap(), AddSphereToDepthMap(), and ObjectGroup::Size(). Referenced by Take_Picture(). Here is the call graph for this function: 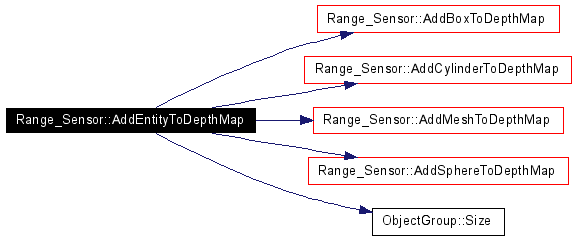 |
|
|
Definition at line 313 of file Range_Sensor.cpp. References Entity::GetTransform(), and Mesh::GetVertexes(). Referenced by AddEntityToDepthMap(). Here is the call graph for this function:  |
|
|
Definition at line 522 of file Range_Sensor.cpp. References MgcBox3::Axis(), MgcBox3::Center(), MgcBox3::Extent(), Entity::GetTransform(), intersect_sphere(), lower_ray_lim_y, lower_ray_lim_z, maxrange, MgcTestIntersection(), MPK_Sphere::Position(), MPK_Sphere::Radius(), ray_array, ray_depth_map, ray_source, theFrustum, ray_array_space::values, MgcVector3::x, MgcVector3::y, and MgcVector3::z. Referenced by AddEntityToDepthMap(). Here is the call graph for this function: 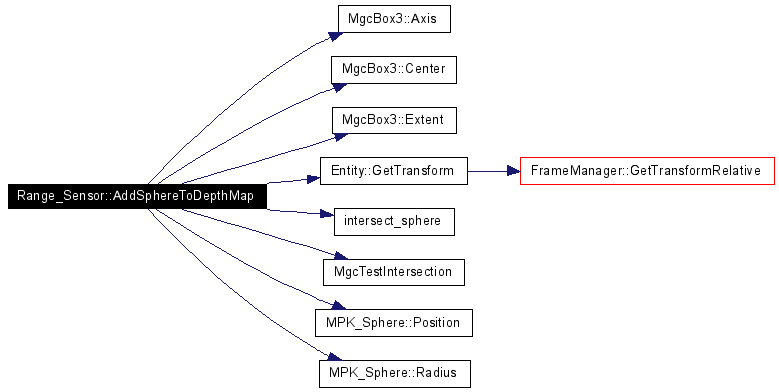 |
|
|
Implements Entity. Definition at line 111 of file Range_Sensor.cpp. |
|
|
Implements ObjectBase. Reimplemented in GL_Range_Sensor. Definition at line 97 of file Range_Sensor.cpp. References Range_Sensor(). Here is the call graph for this function:  |
|
|
Definition at line 146 of file Range_Sensor.cpp. References angle, DisplayingBitmapEnabled, eatwhite(), maxerror, maxrange, RAY_ARRAY_LIMIT, Entity::SetBaseFrame(), Entity::SetName(), user_ray_range_y, and user_ray_range_z. Here is the call graph for this function: 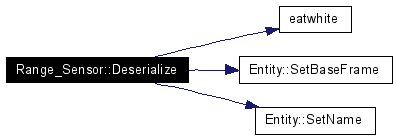 |
|
|
Definition at line 763 of file Range_Sensor.cpp. References maxerror, and ray_depth_map. |
|
|
Definition at line 673 of file Range_Sensor.cpp. References absFrame, angleratio, Entity::GetTransform(), ray_half_limit, ray_source, ObjectBase::theFrame, and Matrix4x4::values. Referenced by Take_Picture(). Here is the call graph for this function:  |
|
|
Definition at line 254 of file Range_Sensor.cpp. References angle. |
|
|
Definition at line 266 of file Range_Sensor.cpp. References maxerror. |
|
|
Definition at line 260 of file Range_Sensor.cpp. References maxrange. Referenced by update_cubes_set(). |
|
|
Implements ObjectBase. Definition at line 104 of file Range_Sensor.cpp. |
|
|
Definition at line 118 of file Range_Sensor.cpp. References angle, Entity::BaseFrame(), DisplayingBitmapEnabled, Entity::GetName(), maxerror, maxrange, user_ray_range_y, and user_ray_range_z. Here is the call graph for this function: 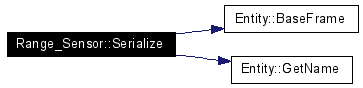 |
|
|
Definition at line 236 of file Range_Sensor.cpp. |
|
|
Definition at line 248 of file Range_Sensor.cpp. |
|
|
Definition at line 242 of file Range_Sensor.cpp. |
|
||||||||||||
|
Definition at line 790 of file Range_Sensor.cpp. References AddEntityToDepthMap(), Generate_Ray_Array(), ray_array, ray_coord_map, ray_depth_map, and ray_source. Here is the call graph for this function: 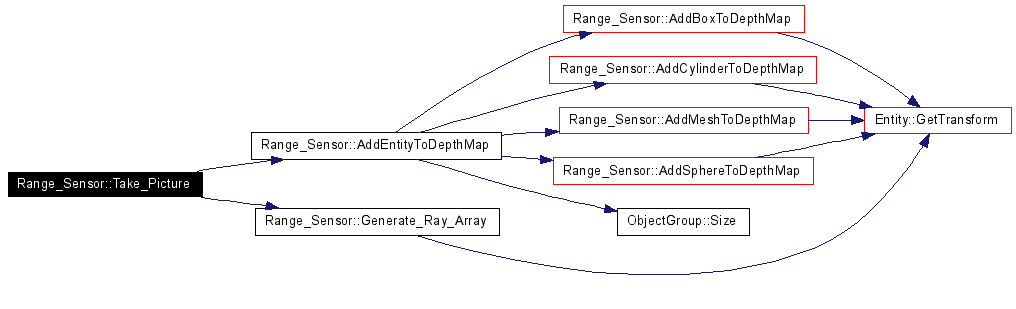 |
|
|
Implements ObjectBase. Definition at line 848 of file Range_Sensor.cpp. |
|
|
Definition at line 98 of file Range_Sensor.h. Referenced by GL_Range_Sensor::DrawExplicit(), Generate_Ray_Array(), and Range_Sensor(). |
|
|
Definition at line 78 of file Range_Sensor.h. Referenced by Range_Sensor(), and ~Range_Sensor(). |
|
|
Definition at line 90 of file Range_Sensor.h. Referenced by Deserialize(), GetAngle(), Range_Sensor(), and Serialize(). |
|
|
Definition at line 94 of file Range_Sensor.h. Referenced by GL_Range_Sensor::DrawExplicit(), and Generate_Ray_Array(). |
|
|
Definition at line 80 of file Range_Sensor.h. Referenced by Range_Sensor(), and ~Range_Sensor(). |
|
|
Definition at line 77 of file Range_Sensor.h. Referenced by Deserialize(), Range_Sensor(), and Serialize(). |
|
|
Definition at line 105 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), AddSphereToDepthMap(), and Range_Sensor(). |
|
|
Definition at line 109 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), AddSphereToDepthMap(), and Range_Sensor(). |
|
|
Definition at line 92 of file Range_Sensor.h. Referenced by Deserialize(), Generate_Coord_Map(), GetMaxError(), Range_Sensor(), and Serialize(). |
|
|
Definition at line 91 of file Range_Sensor.h. Referenced by AddSphereToDepthMap(), Deserialize(), GetMaxRange(), Range_Sensor(), and Serialize(). |
|
|
Definition at line 100 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), AddSphereToDepthMap(), and Take_Picture(). |
|
|
Definition at line 71 of file Range_Sensor.h. Referenced by calculate_scaled_distance(), scale_distance_assign(), Take_Picture(), Octree_Data_Fuser::Update(), and update_cubes_set(). |
|
|
Definition at line 72 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), AddSphereToDepthMap(), Generate_Coord_Map(), Take_Picture(), and update_cubes_set(). |
|
|
Definition at line 102 of file Range_Sensor.h. Referenced by GL_Range_Sensor::DrawExplicit(), Generate_Ray_Array(), and Range_Sensor(). |
|
|
Definition at line 70 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), AddSphereToDepthMap(), Generate_Ray_Array(), and Take_Picture(). |
|
|
Definition at line 96 of file Range_Sensor.h. Referenced by AddBoxToDepthMap(), AddCylinderToDepthMap(), and AddSphereToDepthMap(). |
|
|
Definition at line 106 of file Range_Sensor.h. Referenced by Range_Sensor(). |
|
|
Definition at line 110 of file Range_Sensor.h. Referenced by Range_Sensor(). |
|
|
Definition at line 104 of file Range_Sensor.h. Referenced by Deserialize(), Range_Sensor(), and Serialize(). |
|
|
Definition at line 108 of file Range_Sensor.h. Referenced by Deserialize(), Range_Sensor(), and Serialize(). |
 1.4.6-NO
1.4.6-NO