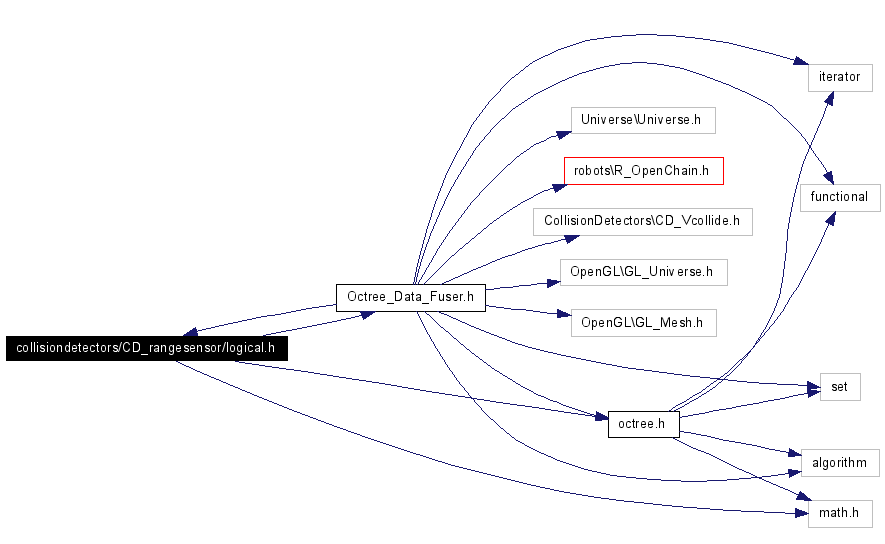
#include "Octree_Data_Fuser.h"#include "octree.h"#include "math.h"Include dependency graph for logical.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | Square |
Defines | |
| #define | logical_h__INCLUDED_ |
Functions | |
| int | white_node (OctreeNode *node) |
| int | black_node (OctreeNode *node) |
| void | delete_node (OctreeNode *node) |
| void | reset_bitbuckets () |
| void | input_bitbucket (char invalue, bool flush, FILE *fp) |
| char | output_bitbucket (bool &eof_found, FILE *fp) |
| OctreeNode * | read_node (FILE *tree_structure) |
| void | save_node (OctreeNode *node, FILE *tree_structure) |
| void | octree_volume (OctreeNode *node, int level) |
| void | negative (OctreeNode *node) |
| OctreeNode * | create_node (char color_node) |
| OctreeNode * | copy (OctreeNode *node) |
| void | clean (OctreeNode *node) |
| void | detach (OctreeNode *node) |
| int | check_node_containment (OctreeNode *node, struct cubic_d *worldsize, vector_d target) |
| OctreeNode * | create_block_node (int level, struct cubic *desired, struct cubic *worldsize, int maxlevel) |
| OctreeNode * | create_line_node (int level, vector_i *center, struct cubic *worldsize, int maxlevel) |
| OctreeNode * | create_view_node (int level, vector_i *center, int arraysize, struct cubic *worldsize, int maxlevel) |
| OctreeNode * | union_node (OctreeNode *node1, OctreeNode *node2) |
| OctreeNode * | intersection_node (OctreeNode *node1, OctreeNode *node2) |
| OctreeNode * | construct_octree_wrapper (struct free_space *pic, int maxlevel, Range_Sensor *jc) |
| OctreeNode * | create_block_wrapper (vector_i center, cubic dimensions, int maxlevel) |
| OctreeNode * | create_line_wrapper (vector_i start, vector_i end, int maxlevel) |
| OctreeNode * | create_view_wrapper (vector_d start, vector_d *end, vector_d *dir, int maxlevel) |
| void | update_cubes_set (std::set< PointClass > &s1, Range_Sensor *camera, OctreeNode *node, struct cubic_d worldsize) |
| void | extract_cubes_set (std::set< PointClass > &s1, double magnifyfactor, std::vector< Square > &squarevector, int maxlevel) |
| void | extract_block_node (OctreeNode *node, struct cubic_d *worldsize, std::vector< Square > &squarevector, bool firstlevel, int colour) |
| void | calc_cube_facets (std::vector< Square > &squarevector, GL_Mesh &mesh) |
|
|
|
|
|
Definition at line 14 of file logical.cpp. References BLACK. Referenced by intersection_node(), and union_node(). |
|
||||||||||||
|
Definition at line 1355 of file logical.cpp. References Mesh::AddVertex(), Mesh::GetFacets(), and Mesh::GetVertexes(). Referenced by Octree_Data_Fuser::Convert(). Here is the call graph for this function: 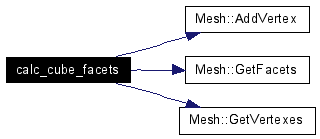 |
|
||||||||||||||||
|
Definition at line 390 of file logical.cpp. References BLACK, check_node_containment(), OctreeNode::color, GRAY, child_pointer::pointer, OctreeNode::son, WHITE, vector_d::x, cubic_d::x0, cubic_d::x1, vector_d::y, cubic_d::y0, cubic_d::y1, vector_d::z, cubic_d::z0, and cubic_d::z1. Referenced by check_node_containment(), and update_cubes_set(). Here is the call graph for this function:  |
|
|
Definition at line 321 of file logical.cpp. References BLACK, clean(), OctreeNode::color, delete_node(), GRAY, child_pointer::pointer, and OctreeNode::son. Referenced by clean(). Here is the call graph for this function: 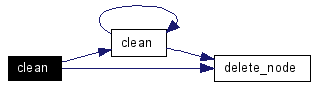 |
|
||||||||||||||||
|
Definition at line 1050 of file logical.cpp. References calculate_scaled_distance(), construct_octree(), cubic::x0, cubic::x1, cubic::y0, cubic::y1, cubic::z0, and cubic::z1. Here is the call graph for this function: 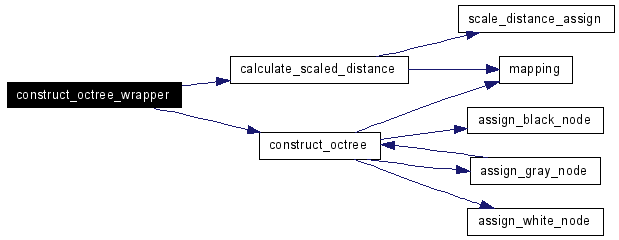 |
|
|
Definition at line 302 of file logical.cpp. References OctreeNode::color, copy(), create_node(), OctreeNode::father, GRAY, child_pointer::pointer, and OctreeNode::son. Referenced by Server::ConfigureRobot(), copy(), Server::GoalConfig(), intersection_node(), Octree_Data_Fuser::Octree_Data_Fuser(), Server::SendString(), Server::StartConfig(), and union_node(). Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 519 of file logical.cpp. References assign_black_node(), assign_white_node(), OctreeNode::color, create_block_node(), OctreeNode::father, GRAY, child_pointer::pointer, OctreeNode::son, cubic::x0, cubic::x1, cubic::y0, cubic::y1, cubic::z0, and cubic::z1. Referenced by Octree_Data_Fuser::Add_Block(), create_block_node(), and create_block_wrapper(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 1068 of file logical.cpp. References create_block_node(), LIMIT, vector_i::x, cubic::x0, cubic::x1, vector_i::y, cubic::y0, cubic::y1, vector_i::z, cubic::z0, and cubic::z1. Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 646 of file logical.cpp. References MAXLINELENGTH, vector_i::x, cubic::x0, cubic::x1, vector_i::y, cubic::y0, cubic::y1, vector_i::z, cubic::z0, and cubic::z1. |
|
||||||||||||||||
|
|
|
|
Definition at line 280 of file logical.cpp. References OctreeNode::father, GRAY, and OctreeNode::son. Referenced by copy(), intersection_node(), Octree_Data_Fuser::Octree_Data_Fuser(), and union_node(). |
|
||||||||||||||||||||||||
|
Definition at line 791 of file logical.cpp. References vector_i::x, cubic::x0, cubic::x1, vector_i::y, cubic::y0, cubic::y1, vector_i::z, cubic::z0, and cubic::z1. |
|
||||||||||||||||||||
|
|
|
|
Definition at line 19 of file logical.cpp. References OctreeNode::father, child_pointer::pointer, and OctreeNode::son. Referenced by Octree_Data_Fuser::Add_Block(), clean(), Octree_Data_Fuser::Load_State(), and Octree_Data_Fuser::~Octree_Data_Fuser(). |
|
|
Definition at line 359 of file logical.cpp. References OctreeNode::father, child_pointer::pointer, and OctreeNode::son. |
|
||||||||||||||||||||||||
|
Definition at line 1209 of file logical.cpp. References OctreeNode::color, extract_block_node(), GRAY, Square::p, child_pointer::pointer, OctreeNode::son, WHITE, cubic_d::x0, cubic_d::x1, cubic_d::y0, cubic_d::y1, cubic_d::z0, and cubic_d::z1. Referenced by extract_block_node(). Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 1130 of file logical.cpp. References Square::p, PointClass::p, vector_d::x, vector_d::y, and vector_d::z. Referenced by Octree_Data_Fuser::Convert(). |
|
||||||||||||||||
|
Definition at line 79 of file logical.cpp. Referenced by save_node(). |
|
||||||||||||
|
Definition at line 995 of file logical.cpp. References BLACK, black_node(), copy(), create_node(), intersection_node(), child_pointer::pointer, OctreeNode::son, and white_node(). Referenced by intersection_node(). Here is the call graph for this function:  |
|
|
Definition at line 249 of file logical.cpp. References BLACK, OctreeNode::color, negative(), child_pointer::pointer, OctreeNode::son, and WHITE. Referenced by negative(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 228 of file logical.cpp. References OctreeNode::color, OctreeNode::father, octree_volume(), child_pointer::pointer, OctreeNode::son, and WHITE. Referenced by octree_volume(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 112 of file logical.cpp. Referenced by read_node(). |
|
|
Definition at line 147 of file logical.cpp. References OctreeNode::color, OctreeNode::father, GRAY, output_bitbucket(), child_pointer::pointer, read_node(), and OctreeNode::son. Referenced by Octree_Data_Fuser::Load_State(), and read_node(). Here is the call graph for this function:  |
|
|
Definition at line 70 of file logical.cpp. Referenced by Octree_Data_Fuser::Load_State(), and Octree_Data_Fuser::Save_State(). |
|
||||||||||||
|
Definition at line 193 of file logical.cpp. References BLACK, OctreeNode::color, OctreeNode::father, GRAY, input_bitbucket(), child_pointer::pointer, save_node(), OctreeNode::son, and WHITE. Referenced by save_node(), and Octree_Data_Fuser::Save_State(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 938 of file logical.cpp. References black_node(), copy(), create_node(), child_pointer::pointer, OctreeNode::son, union_node(), WHITE, and white_node(). Referenced by Octree_Data_Fuser::Add_Block(), and union_node(). Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 1098 of file logical.cpp. References check_node_containment(), Range_Sensor::GetMaxRange(), PointClass::p, Range_Sensor::ray_coord_map, Range_Sensor::ray_depth_map, vector_d::x, vector_d::y, and vector_d::z. Here is the call graph for this function:  |
|
|
Definition at line 9 of file logical.cpp. References WHITE. Referenced by intersection_node(), and union_node(). |
 1.4.6-NO
1.4.6-NO