#include <basic/universe/Entity.h>
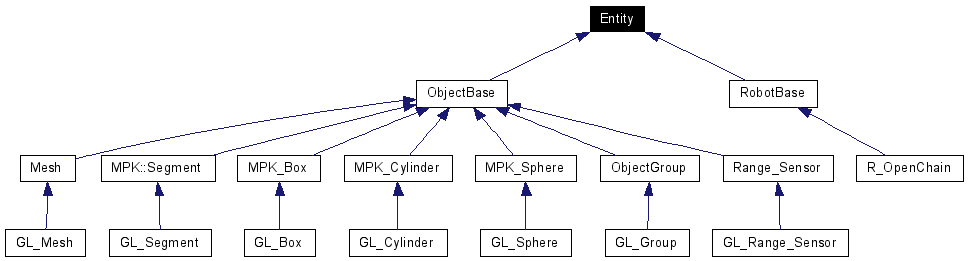
Inherited by ObjectBase, and RobotBase.
Inheritance diagram for Entity:
Public Member Functions | |
| Entity (FrameManager *frameManager) | |
| Entity (const Entity &right) | |
| virtual | ~Entity () |
| virtual Entity * | Clone () const =0 |
| virtual bool | IsInterfering (const Entity *entity) const =0 |
| virtual void | SetBaseFrame (const unsigned int baseFrame) |
| virtual void | SetFrameManager (FrameManager *frameManager) |
| Matrix4x4 | GetTransform () const |
| virtual bool | CanCheckInterference (const Entity *entity) const =0 |
| unsigned int | BaseFrame () const |
| void | SetName (const char *name) |
| const char * | GetName () const |
| virtual bool | DeserializeEntity (IfstreamWithComments &is) |
Protected Attributes | |
| unsigned int | baseFrame |
| char * | name |
| FrameManager * | frameManager |
Definition at line 43 of file Entity.h.
|
|
Definition at line 6 of file Entity.cpp. References SetName(). Here is the call graph for this function:  |
|
|
Definition at line 15 of file Entity.cpp. References GetName(), and SetName(). Here is the call graph for this function:  |
|
|
Definition at line 28 of file Entity.cpp. References baseFrame, frameManager, and name. |
|
|
Definition at line 63 of file Entity.cpp. References baseFrame. Referenced by CD_Swiftpp::AddEntityToSwiftScene(), CD_Vcollide::AddEntityToVcollide(), CD_Simple::IsInterfering(), MPK::Segment::IsInterfering(), CD_Solid::MarkIndexEntityRelationship(), and Range_Sensor::Serialize(). |
|
|
Implemented in Range_Sensor, Mesh, MPK_Box, MPK_Cylinder, MPK::Segment, MPK_Sphere, ObjectGroup, and R_OpenChain. Referenced by ObjectGroup::CanCheckInterference(), and ObjectGroup::IsInterfering(). |
|
|
Implemented in Range_Sensor, Mesh, MPK::Segment, MPK_Sphere, ObjectBase, ObjectGroup, GL_Box, GL_Cylinder, GL_Group, GL_Mesh, GL_Range_Sensor, GL_Segment, GL_Sphere, R_OpenChain, and RobotBase. |
|
|
Definition at line 89 of file Entity.cpp. References IfstreamWithComments::GetSolidLine(), name, and SetName(). Referenced by RobotBase::Deserialize(). Here is the call graph for this function:  |
|
|
Definition at line 80 of file Entity.cpp. References name. Referenced by Entity(), and Range_Sensor::Serialize(). |
|
|
Definition at line 55 of file Entity.cpp. References baseFrame, frameManager, and FrameManager::GetTransformRelative(). Referenced by Range_Sensor::AddBoxToDepthMap(), Range_Sensor::AddCylinderToDepthMap(), Range_Sensor::AddMeshToDepthMap(), Range_Sensor::AddSphereToDepthMap(), Range_Sensor::Generate_Ray_Array(), CD_Swiftpp::IsInterfering(), MPK_Sphere::IsInterfering(), Mesh::IsInterfering(), CD_Swiftpp::QueryContactDetermination(), and Range_Sensor::Range_Sensor(). Here is the call graph for this function:  |
|
|
Implemented in Range_Sensor, Mesh, MPK_Box, MPK_Cylinder, MPK::Segment, MPK_Sphere, ObjectBase, ObjectGroup, and R_OpenChain. |
|
|
Reimplemented in ObjectGroup. Definition at line 41 of file Entity.cpp. Referenced by DH_Link::AddObject(), ServerBase::AddObstacle(), Range_Sensor::Deserialize(), and ObjectGroup::SetBaseFrame(). |
|
|
Reimplemented in ObjectGroup. Definition at line 48 of file Entity.cpp. References frameManager. Referenced by Universe::AddEntity(), CD_BasicStyle::CD_BasicStyle(), and ObjectGroup::SetFrameManager(). |
|
|
Definition at line 71 of file Entity.cpp. Referenced by Octree_Data_Fuser::Convert(), DH_Link::DeSerialize(), Range_Sensor::Deserialize(), DeserializeEntity(), and Entity(). |
|
|
Reimplemented in ObjectGroup. Definition at line 100 of file Entity.h. Referenced by BaseFrame(), GetTransform(), MPK_Sphere::IsInterfering(), MPK::Segment::IsInterfering(), and ~Entity(). |
|
|
Definition at line 113 of file Entity.h. Referenced by R_OpenChain::AddToolFrame(), RobotBase::DeserializeAbstract(), GetTransform(), MPK_Sphere::IsInterfering(), SetFrameManager(), ObjectGroup::SetFrameManager(), and ~Entity(). |
|
|
Definition at line 105 of file Entity.h. Referenced by DeserializeEntity(), GetName(), and ~Entity(). |
 1.4.6-NO
1.4.6-NO