#include <planners/atace/PL_RGD_Constraint.h>
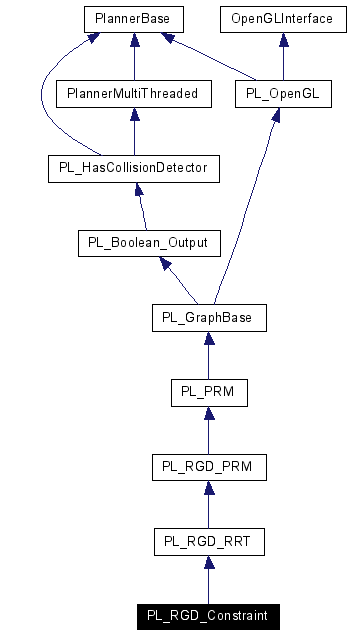
Inherits PL_RGD_RRT.
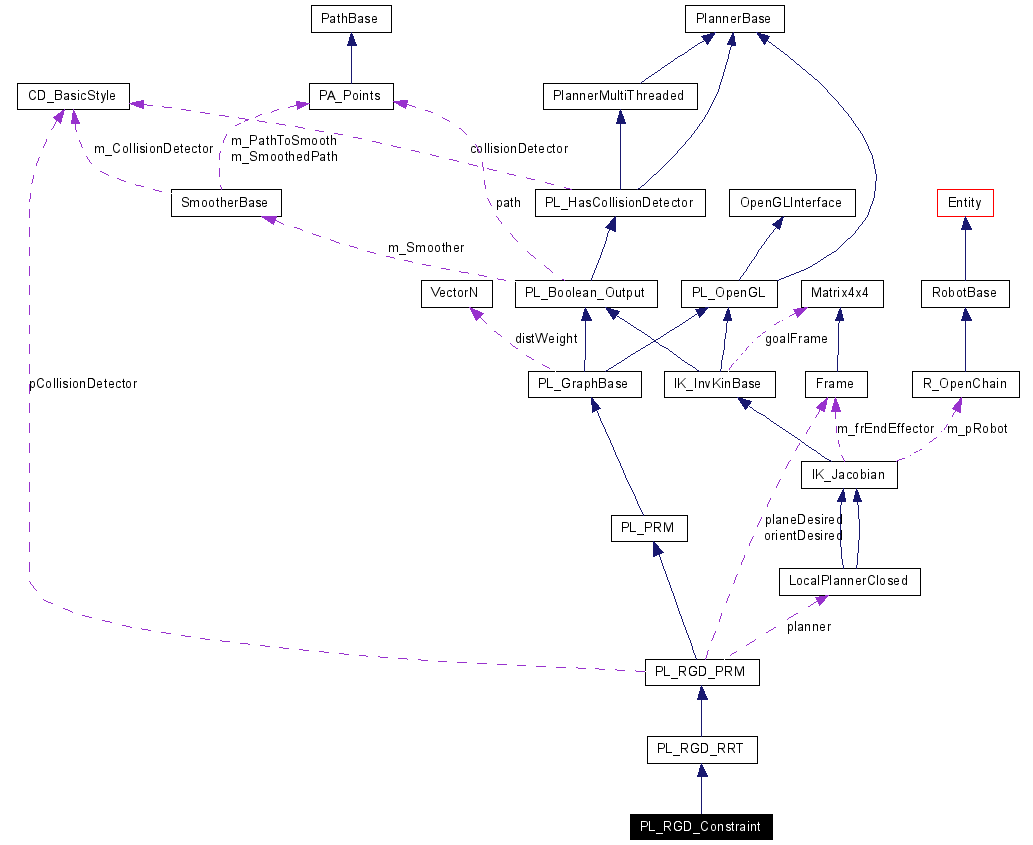
Inheritance diagram for PL_RGD_Constraint:
Public Member Functions | |
| PL_RGD_Constraint () | |
| void | SetStrategy (int strategy) |
| int | GetStrategy () |
| virtual bool | DrawExplicit () const |
| virtual bool | Plan () |
Private Attributes | |
| int | m_strategy |
Definition at line 129 of file PL_RGD_Constraint.h.
|
|
Definition at line 1528 of file PL_RGD_Constraint.cpp. References m_strategy, and STRATEGY_RRT. |
|
|
Reimplemented from PL_RGD_RRT. Definition at line 1555 of file PL_RGD_Constraint.cpp. References PL_PRM::DrawExplicit(), PL_RGD_RRT::DrawExplicit(), m_strategy, and STRATEGY_RRT. Here is the call graph for this function:  |
|
|
Definition at line 1550 of file PL_RGD_Constraint.cpp. References m_strategy. |
|
|
Reimplemented from PL_RGD_RRT. Definition at line 1563 of file PL_RGD_Constraint.cpp. References m_strategy, PL_RGD_PRM::Plan(), PL_RGD_RRT::Plan(), and STRATEGY_RRT. Here is the call graph for this function: 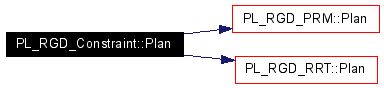 |
|
|
Definition at line 1533 of file PL_RGD_Constraint.cpp. References PA_Points::Clear(), PL_GraphBase::ClearGraph(), PL_RGD_RRT::ClearTree(), m_strategy, PL_Boolean_Output::path, and STRATEGY_RRT. Here is the call graph for this function: 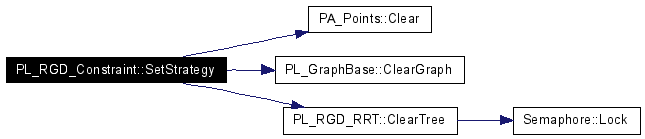 |
|
|
Definition at line 140 of file PL_RGD_Constraint.h. Referenced by DrawExplicit(), GetStrategy(), PL_RGD_Constraint(), Plan(), and SetStrategy(). |
 1.4.6-NO
1.4.6-NO