#include <planners/atace/PL_RGD_Constraint.h>
Inherits PL_RGD_PRM.
Inherited by PL_RGD_Constraint.
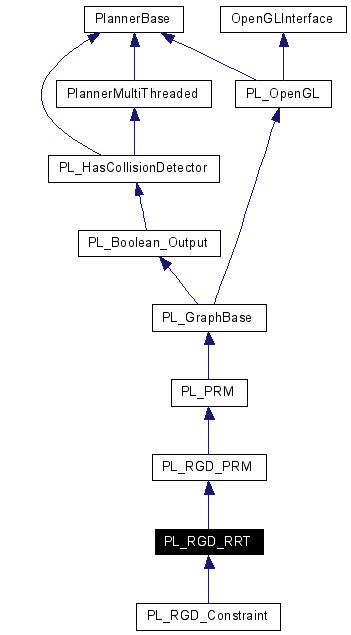
Inheritance diagram for PL_RGD_RRT:
Public Member Functions | |
| PL_RGD_RRT () | |
| ~PL_RGD_RRT () | |
| virtual bool | DrawExplicit () const |
| virtual bool | Plan () |
Protected Member Functions | |
| bool | CreateTree (Configuration &conf) |
| void | ClearTree () |
| vertex | AddNodeInTree (vertex parentVertex, Configuration &childConf, PA_Points &localPath) |
| vertex | FindClosestInTree (Configuration &conf) |
| Configuration & | GetConfigurationFromTree (vertex vert) |
| PA_Points & | GetPathFromTree (vertex vert) |
| double | Distance (const Configuration &conf1, const Configuration &conf2) |
| int | Extend (Configuration &fromConf, Configuration &toConf, Configuration dirConf, PA_Points &edgePath) |
| int | ConnectToGoal () |
Protected Attributes | |
| vertex | m_goalVert |
| vertex | m_rootVert |
| dynamic_trees | m_trajTree |
| std::vector< vertex > | m_vertices |
Private Member Functions | |
| void | RetrievePath (vertex &goalVert) |
| void | CopyPath (PA_Points &target, PA_Points &source) |
| void | AppendPath (PA_Points &collect, PA_Points &local) |
| void | AppendPath (PA_Points &collect, PA_Points *local) |
| void | InsertPath (PA_Points &target, PA_Points &source) |
Definition at line 92 of file PL_RGD_Constraint.h.
|
|
Definition at line 1141 of file PL_RGD_Constraint.cpp. References m_goalVert, and m_rootVert. |
|
|
Definition at line 1147 of file PL_RGD_Constraint.cpp. References ClearTree(), and m_rootVert. Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 1420 of file PL_RGD_Constraint.cpp. References VertexInfoInTree::conf, CopyPath(), VertexInfoInTree::edge, PlannerBase::guid, Semaphore::Lock(), m_vertices, and Semaphore::Unlock(). Referenced by ConnectToGoal(), and Plan(). Here is the call graph for this function: 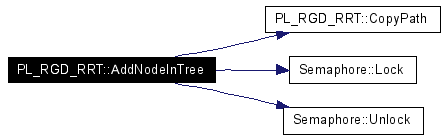 |
|
||||||||||||
|
Definition at line 1506 of file PL_RGD_Constraint.cpp. References PA_Points::AppendPoint(), PA_Points::GetPoint(), and PA_Points::Size(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1498 of file PL_RGD_Constraint.cpp. References PA_Points::AppendPoint(), and PA_Points::Size(). Here is the call graph for this function:  |
|
|
Definition at line 1403 of file PL_RGD_Constraint.cpp. References PlannerBase::guid, Semaphore::Lock(), and m_vertices. Referenced by CreateTree(), PL_RGD_Constraint::SetStrategy(), and ~PL_RGD_RRT(). Here is the call graph for this function:  |
|
|
Definition at line 1339 of file PL_RGD_Constraint.cpp. References AddNodeInTree(), PA_Points::AppendPoint(), PL_RGD_PRM::edgeFrag, ERR_SUCCESS, FindClosestInTree(), PL_RGD_PRM::GenerateRandomConfigForPose(), GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), PL_RGD_PRM::GetToolFrame(), PlannerBase::HasTimeLimitExpired(), PL_RGD_PRM::IsInterfering(), m_goalVert, MAX_CONF_RETRY, and PL_RGD_PRM::useGoalPose. Referenced by Plan(). Here is the call graph for this function: 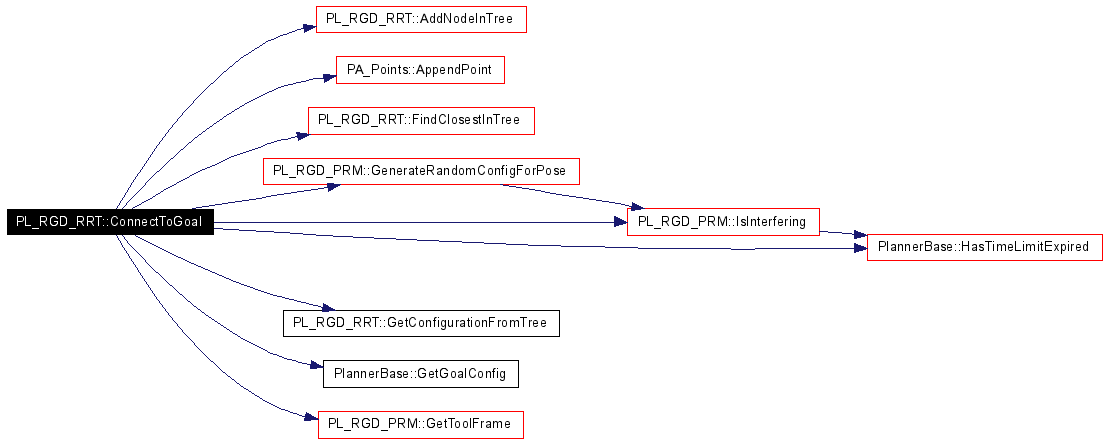 |
|
||||||||||||
|
Definition at line 123 of file PL_RGD_Constraint.h. Referenced by AddNodeInTree(). |
|
|
Definition at line 1384 of file PL_RGD_Constraint.cpp. References ClearTree(), VertexInfoInTree::conf, PlannerBase::guid, Semaphore::Lock(), m_rootVert, m_vertices, and Semaphore::Unlock(). Referenced by Plan(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1470 of file PL_RGD_Constraint.cpp. References PL_HasCollisionDetector::collisionDetector, PL_PRM::dist, CD_JointLimits::JointDisplacement(), and VectorN::Length(). Referenced by Extend(), and FindClosestInTree(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_PRM. Reimplemented in PL_RGD_Constraint. Definition at line 1153 of file PL_RGD_Constraint.cpp. References VertexInfoInTree::conf, PlannerBase::guid, Semaphore::Lock(), m_trajTree, and m_vertices. Referenced by PL_RGD_Constraint::DrawExplicit(). Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 1295 of file PL_RGD_Constraint.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), PL_PRM::dist, Distance(), PL_RGD_PRM::edgeFrag, ERR_FAIL, ERR_SUCCESS, PL_RGD_PRM::GetSatisfiedConfiguration(), PL_RGD_PRM::IsInterfering(), LEN_STEP_SIZE, and MAX_CONF_RETRY. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Definition at line 1436 of file PL_RGD_Constraint.cpp. References VertexInfoInTree::conf, Distance(), and m_vertices. Referenced by ConnectToGoal(), and Plan(). Here is the call graph for this function:  |
|
|
Definition at line 1463 of file PL_RGD_Constraint.cpp. References VertexInfoInTree::conf. Referenced by ConnectToGoal(), and Plan(). |
|
|
Definition at line 1481 of file PL_RGD_Constraint.cpp. References VertexInfoInTree::edge. Referenced by RetrievePath(). |
|
||||||||||||
|
Definition at line 1514 of file PL_RGD_Constraint.cpp. References PA_Points::Size(). Referenced by RetrievePath(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_RGD_PRM. Reimplemented in PL_RGD_Constraint. Definition at line 1236 of file PL_RGD_Constraint.cpp. References AddNodeInTree(), PA_Points::Clear(), ConnectToGoal(), CreateTree(), ERR_FAIL, ERR_SUCCESS, ERR_TIMEOUT, Extend(), FindClosestInTree(), PL_RGD_PRM::GenerateRandomConfig(), GetConfigurationFromTree(), PlannerBase::GetStartConfig(), PlannerBase::HasTimeLimitExpired(), m_goalVert, PL_Boolean_Output::path, RetrievePath(), and PlannerBase::StartTimer(). Referenced by PL_RGD_Constraint::Plan(). Here is the call graph for this function:  |
|
|
Definition at line 1488 of file PL_RGD_Constraint.cpp. References GetPathFromTree(), InsertPath(), and PL_Boolean_Output::path. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Definition at line 102 of file PL_RGD_Constraint.h. Referenced by ConnectToGoal(), PL_RGD_RRT(), and Plan(). |
|
|
Definition at line 103 of file PL_RGD_Constraint.h. Referenced by CreateTree(), PL_RGD_RRT(), and ~PL_RGD_RRT(). |
|
|
Definition at line 107 of file PL_RGD_Constraint.h. Referenced by DrawExplicit(). |
|
|
Definition at line 108 of file PL_RGD_Constraint.h. Referenced by AddNodeInTree(), ClearTree(), CreateTree(), DrawExplicit(), and FindClosestInTree(). |
 1.4.6-NO
1.4.6-NO