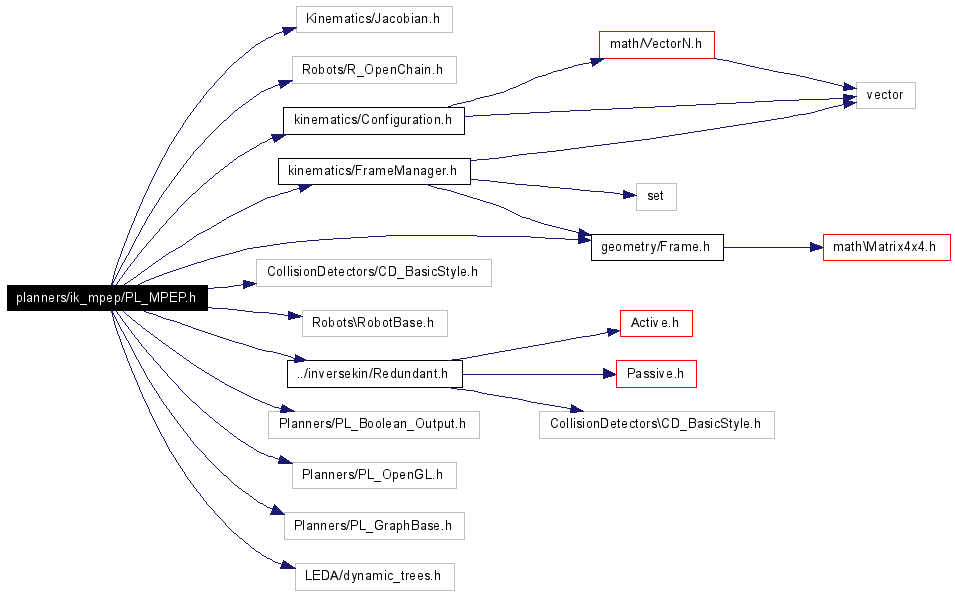
#include "Kinematics/Jacobian.h"#include "Robots/R_OpenChain.h"#include "geometry/Frame.h"#include "kinematics/Configuration.h"#include "CollisionDetectors/CD_BasicStyle.h"#include "kinematics/FrameManager.h"#include "Robots\RobotBase.h"#include "../inversekin/Redundant.h"#include "Planners/PL_Boolean_Output.h"#include "Planners/PL_OpenGL.h"#include "Planners/PL_GraphBase.h"#include <LEDA/dynamic_trees.h>Include dependency graph for PL_MPEP.h:
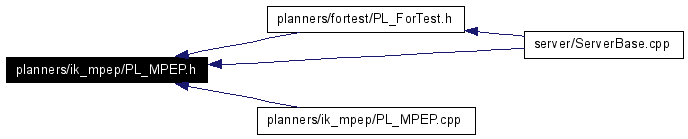
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | Pose_Node |
| class | PL_MPEP |
Defines | |
| #define | DEFAULT_SAMPLE_RATE 10 |
| #define | DEFAULT_TOLERANCE 0.1 |
| #define | DEFAULT_RANDOM_RETRY 150 |
| #define | DEFAULT_EXTEND_RETRY 50 |
| #define | DEFAULT_EXPLORE_RETRY 20 |
| #define | DEFAULT_ITERATION 10 |
| #define | DEFAULT_SMGNODE_NUM 10 |
| #define | ALG_GREEDY_PLANNER 0x00 |
| #define | ALG_RRT_LIKE 0x01 |
| #define | ALG_RRT_CONNECT_LIKE 0x02 |
| #define | ALG_RRT_GREEDY_LIKE 0x03 |
| #define | ALG_RRT_GREED_CONNECT 0x04 |
| #define | ALG_IMP_GREEDY_PLANNER 0x05 |
| #define | ALG_SMG_GREEDY_PLANNER 0x06 |
| #define | ALG_SMG_RRT_PLANNER 0x07 |
| #define | ALG_SMG_CONNECT_PLANNER 0x08 |
| #define | ERROR_OK 0x00 |
| #define | ERROR_GET_RANDOM_CONF_FAILURE 0x01 |
| #define | ERROR_GET_COLLISION_FREE_FAILURE 0x02 |
| #define | ERROR_RRT_EXTEND_FAILURE 0x03 |
| #define | ERROR_START_CONFIG_INVALID 0x04 |
| #define | ERROR_GOAL_CONFIG_INVALID 0x05 |
| #define | ERROR_SMGRAPH_FULL 0x06 |
| #define | ERROR_PLANNING_TIMEOUT 0x0FE |
| #define | ERROR_UNKNOW_PLANNER 0x0FF |
| #define | TRAJ_LINE 0x00 |
| #define | TRAJ_SEMICIRCLE 0x01 |
| #define | TRAJ_CIRCLE 0x02 |
|
|
Definition at line 24 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(), and RRT_TrajPlanner::Plan(). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Definition at line 17 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
Definition at line 16 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
Definition at line 18 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
Definition at line 15 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
|
|
|
Definition at line 19 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
Definition at line 14 of file PL_MPEP.h. Referenced by PL_MPEP::PL_MPEP(). |
|
|
Definition at line 36 of file PL_MPEP.h. Referenced by PL_MPEP::Display_Error_Message(). |
|
|
Definition at line 35 of file PL_MPEP.h. Referenced by PL_MPEP::Display_Error_Message(). |
|
|
Definition at line 39 of file PL_MPEP.h. Referenced by PL_MPEP::Display_Error_Message(). |
|
|
|
|
|
Definition at line 40 of file PL_MPEP.h. Referenced by PL_MPEP::Display_Error_Message(), and PL_ForTest::Establish_Self_Motion_Graph(). |
|
|
Definition at line 38 of file PL_MPEP.h. Referenced by PL_MPEP::Display_Error_Message(), PL_MPEP::InitializeTree(), and PL_MPEP::Plan(). |
|
|
|
|
|
|
|
|
|
|
|
|
 1.4.6-NO
1.4.6-NO