#include <planners/ik_mpep/PL_MPEP.h>
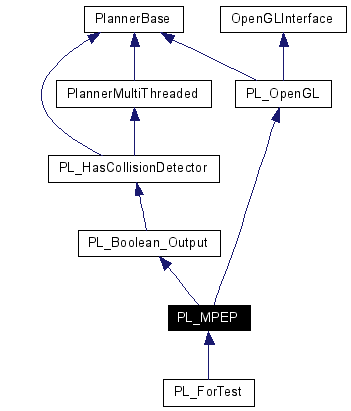
Inherits PL_Boolean_Output, and PL_OpenGL.
Inherited by PL_ForTest.
Inheritance diagram for PL_MPEP:
Public Member Functions | |
| PL_MPEP () | |
| virtual | ~PL_MPEP () |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
| virtual bool | DrawExplicit () const |
| virtual bool | Plan () |
| Frame | GetToolFrame (const Configuration &config) const |
| void | SetTrajectory (std::vector< Frame > &traj) |
| void | SetPassiveNum (unsigned int num) |
| void | SetAlgorithm (unsigned int alg) |
| void | SetTolerance (double dist) |
| void | SetUsingStartConfig (bool use) |
| void | SetUsingGoalConfig (bool use) |
| void | SetRandomRetry (unsigned int retry) |
| void | SetExtendNum (unsigned int num) |
| void | SetExploreNum (unsigned int num) |
| void | SetIterationNum (unsigned int num) |
| void | SetSMGNodeNum (unsigned int num) |
| void | SetUsingJacobianExt (bool use) |
Protected Member Functions | |
| bool | GetConfigurationByDirection (Configuration &conf, Configuration &base, Configuration &direct) |
| bool | GetRandomConfiguration (Configuration &conf) |
| bool | GetRandomConfiguration (Configuration &conf, Frame &frame) |
| bool | GetRandomConfiguration (Configuration &conf, Frame &frame, Configuration &bias) |
| int | Greedy_Step (int &begin, int end, vertex &base) |
| int | RRT_Extend_Like (dynamic_trees &tr, std::vector< vertex > &vert, int &extPose, vertex &extended, int dir=1) |
| int | Step (dynamic_trees &tr, std::vector< vertex > &vert, int begin, int end, vertex &base, int dir=1) |
| bool | IsJointWithinLimits (Configuration &config) |
| bool | AdjustConfiguration (Configuration &config, int nPose) |
| int | Extend_Node_Self_Motion_Graph_Jacobian (vertex g_vertex, Configuration **nextConf) |
| int | Establish_Self_Motion_Graph (dynamic_trees &tr, vertex extended) |
| int | Extend_Node_Self_Motion_Graph (vertex g_vertex, Configuration **) |
| int | CheckConnectivity (dynamic_trees &tr, std::vector< vertex > &vert, vertex extendedVert, vertex &connectedVert, int dir) |
| int | Planner_Greedy () |
| int | Planner_RRT_Like () |
| int | Planner_RRT_Connect_Like () |
| int | Planner_RRT_Greedy_Like () |
| int | Planner_RRT_Greedy_Connect () |
| int | Planner_IMP_Greedy () |
| int | Planner_SMG_Greedy () |
| int | Planner_SMG_RRT_Connect_Like () |
| int | Planner_SMG_RRT_Greedy_Like () |
| void | ClearTree () |
| int | InitializeTree () |
| void | RetrievePathFromTree () |
| vertex | ConnectNode (dynamic_trees &tr, std::vector< vertex > &vert, vertex &parent, Pose_Node &child) |
| vertex | GetNearestNodeInTree (dynamic_trees &tr, std::vector< vertex > &vert, Configuration &conf) |
| vertex | GetClosestPoseVert (dynamic_trees &tr, std::vector< vertex > &vert) |
| void * | GetNearestNodeInGraph (SMGraph *graph, Configuration *conf) |
| double | Distance (Configuration &conf1, Configuration &conf2) |
| double | DistanceInActiveJoints (Configuration &conf1, Configuration &conf2) |
| void | Display_Error_Message (int result) |
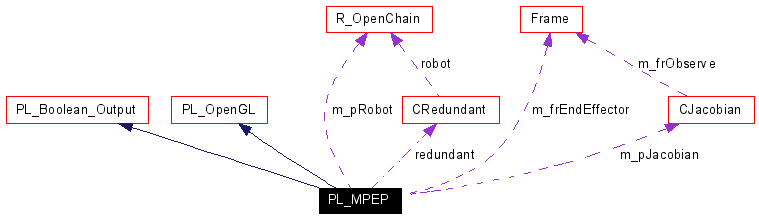
Protected Attributes | |
| R_OpenChain * | m_pRobot |
| int | m_nDof |
| int | m_nToolFrame |
| Frame | m_frEndEffector |
| CJacobian * | m_pJacobian |
| CRedundant | redundant |
| vertex | goalPoseVertex |
| vertex | goalPoseVertex2 |
| vertex | startPoseVertex |
| dynamic_trees | tree |
| std::vector< vertex > | vertices |
| dynamic_trees | goal_tree |
| std::vector< vertex > | goal_vertices |
| std::vector< vertex > | itinerary |
| std::vector< Frame > | poses |
| unsigned int | algorithm |
| unsigned int | passiveNum |
| unsigned int | randomRetry |
| unsigned int | extendNum |
| unsigned int | exploreNum |
| unsigned int | iterationNum |
| unsigned int | smgNodeNum |
| double | distTolerance |
| bool | usingStartConfig |
| bool | usingGoalConfig |
| bool | usingGoalTree |
| bool | usingJacobianExt |
Definition at line 89 of file PL_MPEP.h.
|
|
Definition at line 72 of file PL_MPEP.cpp. References ALG_GREEDY_PLANNER, algorithm, ClearTree(), DEFAULT_EXPLORE_RETRY, DEFAULT_EXTEND_RETRY, DEFAULT_ITERATION, DEFAULT_RANDOM_RETRY, DEFAULT_SMGNODE_NUM, DEFAULT_TOLERANCE, distTolerance, exploreNum, extendNum, iterationNum, m_pJacobian, passiveNum, randomRetry, smgNodeNum, usingGoalConfig, usingGoalTree, usingJacobianExt, and usingStartConfig. Here is the call graph for this function:  |
|
|
Definition at line 90 of file PL_MPEP.cpp. References ClearTree(), and m_pJacobian. Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented in PL_ForTest. Definition at line 259 of file PL_MPEP.cpp. References DEF_ERROR_TOLERANCE, CJacobian::GetMatrix(), GetToolFrame(), Frame::GetTranslationVector(), Matrixmxn::Inverse(), m_frEndEffector, m_nDof, m_pJacobian, Vector4::Magnitude(), poses, Rad2Deg(), CJacobian::SetConfiguration(), and CJacobian::SetInterestPoint(). Referenced by Extend_Node_Self_Motion_Graph_Jacobian(). Here is the call graph for this function: 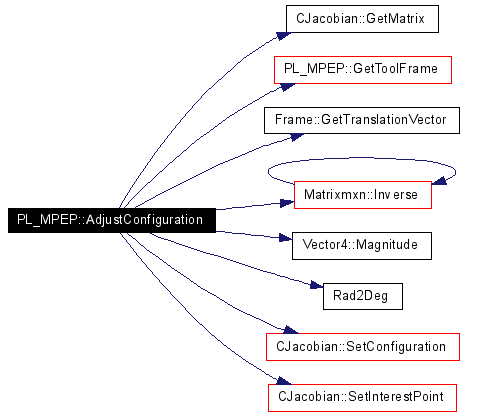 |
|
||||||||||||||||||||||||
|
Definition at line 552 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, Pose_Node::conf, SMGraph::FirstNode(), SMGraph::GetConfiguration(), Pose_Node::graph, CD_Linear::IsInterferingLinear(), SMGraph::NextNode(), Pose_Node::poses, and tree. Referenced by Planner_SMG_RRT_Connect_Like(). Here is the call graph for this function: 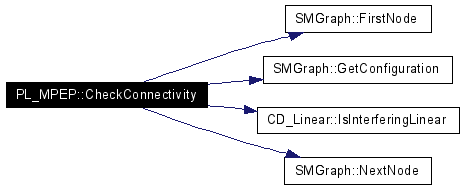 |
|
|
Definition at line 1560 of file PL_MPEP.cpp. References PlannerBase::guid, Semaphore::Lock(), numTotalNode, tree, and vertices. Referenced by InitializeTree(), PL_MPEP(), and ~PL_MPEP(). Here is the call graph for this function:  |
|
||||||||||||||||||||
|
Definition at line 1594 of file PL_MPEP.cpp. References Pose_Node::conf, Pose_Node::graph, PlannerBase::guid, Semaphore::Lock(), Pose_Node::poses, and Semaphore::Unlock(). Referenced by Greedy_Step(), and Step(). Here is the call graph for this function:  |
|
|
Definition at line 1908 of file PL_MPEP.cpp. References ERROR_GET_COLLISION_FREE_FAILURE, ERROR_GET_RANDOM_CONF_FAILURE, ERROR_GOAL_CONFIG_INVALID, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, ERROR_SMGRAPH_FULL, and ERROR_START_CONFIG_INVALID. |
|
||||||||||||
|
Definition at line 1700 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_JointLimits::JointDisplacement(), VectorN::Length(), and Sqr(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1714 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_JointLimits::JointDisplacement(), VectorN::Length(), passiveNum, and Sqr(). Referenced by GetNearestNodeInGraph(), and GetNearestNodeInTree(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_OpenGL. Reimplemented in PL_ForTest. Definition at line 1941 of file PL_MPEP.cpp. References SMGraph::GetConfig(), SMGraph::GetSMGraph(), Pose_Node::graph, Semaphore::Lock(), tree, and vertices. Referenced by PL_ForTest::DrawExplicit(). Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented in PL_ForTest. Definition at line 470 of file PL_MPEP.cpp. References Pose_Node::conf, ERROR_OK, Extend_Node_Self_Motion_Graph(), Extend_Node_Self_Motion_Graph_Jacobian(), Pose_Node::graph, SMGraph::Node_Num(), numFinalSMGNode, numFinalSMGraph, numSMGNode, numSMGraph, smgNodeNum, and usingJacobianExt. Referenced by Planner_SMG_Greedy(), and Planner_SMG_RRT_Greedy_Like(). Here is the call graph for this function: 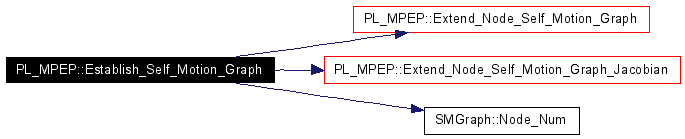 |
|
||||||||||||
|
Reimplemented in PL_ForTest. Definition at line 416 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, distTolerance, SMGraph::GetConfiguration(), CRedundant::GetConfigurationByActive(), GetConfigurationByDirection(), GetNearestNodeInGraph(), GetRandomConfiguration(), Pose_Node::graph, CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), Pose_Node::poses, poses, randomRetry, redundant, and tree. Referenced by Establish_Self_Motion_Graph(). Here is the call graph for this function: 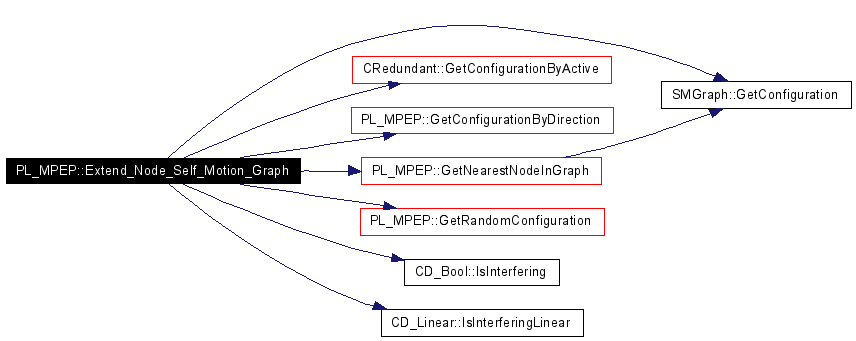 |
|
||||||||||||
|
Reimplemented in PL_ForTest. Definition at line 317 of file PL_MPEP.cpp. References AdjustConfiguration(), PL_HasCollisionDetector::collisionDetector, DEF_SMG_STEPSIZE, SMGraph::GetConfiguration(), CJacobian::GetMatrix(), GetNearestNodeInGraph(), GetRandomConfiguration(), Pose_Node::graph, Matrixmxn::Inverse(), CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), IsJointWithinLimits(), m_nDof, m_pJacobian, Pose_Node::poses, randomRetry, and tree. Referenced by Establish_Self_Motion_Graph(). Here is the call graph for this function: 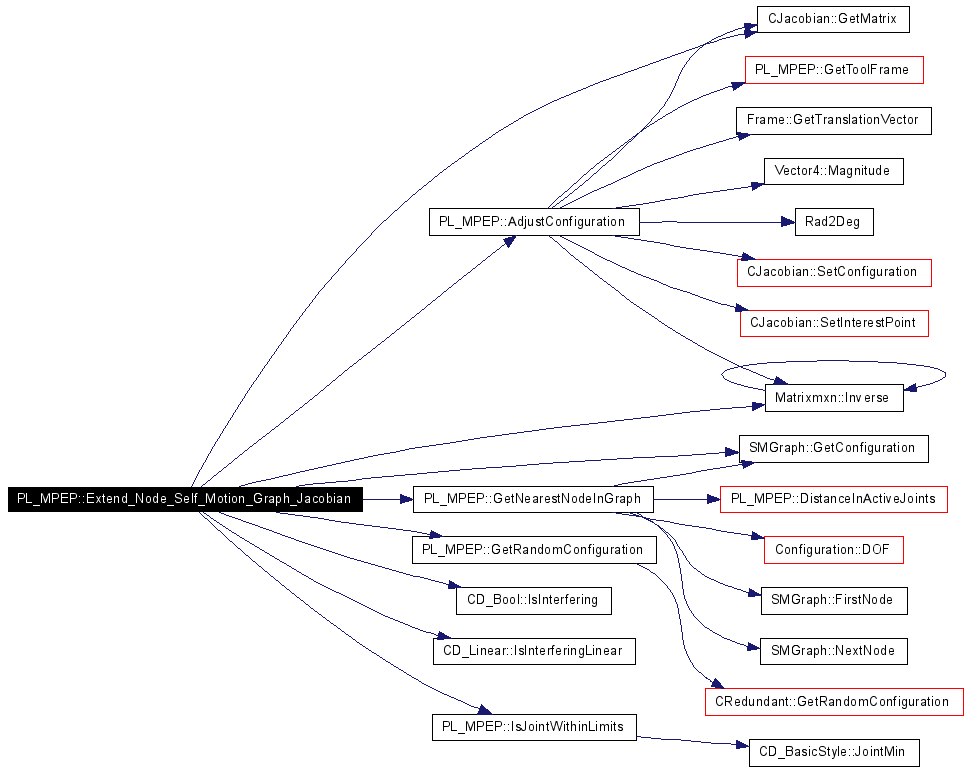 |
|
||||||||||||
|
Definition at line 1673 of file PL_MPEP.cpp. References Pose_Node::poses. Referenced by Planner_RRT_Greedy_Connect(), and Planner_RRT_Greedy_Like(). |
|
||||||||||||||||
|
Definition at line 1729 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), passiveNum, and VectorN::SetLength(). Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), and RRT_Extend_Like(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1446 of file PL_MPEP.cpp. References DistanceInActiveJoints(), Configuration::DOF(), SMGraph::FirstNode(), SMGraph::GetConfiguration(), and SMGraph::NextNode(). Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), Extend_Node_Self_Motion_Graph_Jacobian(), and PL_ForTest::Extend_Node_Self_Motion_Graph_Jacobian(). Here is the call graph for this function: 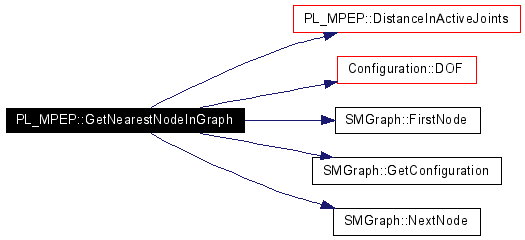 |
|
||||||||||||||||
|
Definition at line 1420 of file PL_MPEP.cpp. References Pose_Node::conf, and DistanceInActiveJoints(). Referenced by RRT_Extend_Like(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 1781 of file PL_MPEP.cpp. References distTolerance, CRedundant::GetRandomConfiguration(), GetRandomConfiguration(), and redundant. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1769 of file PL_MPEP.cpp. References CRedundant::GetRandomConfiguration(), and redundant. Here is the call graph for this function:  |
|
|
Definition at line 1758 of file PL_MPEP.cpp. References CRedundant::GetRandomConfiguration(), and redundant. Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), Extend_Node_Self_Motion_Graph_Jacobian(), PL_ForTest::Extend_Node_Self_Motion_Graph_Jacobian(), GetRandomConfiguration(), Greedy_Step(), RRT_Extend_Like(), and Step(). Here is the call graph for this function:  |
|
|
Definition at line 102 of file PL_MPEP.cpp. References CRedundant::GetDesireFrameByConfiguration(), and redundant. Referenced by AdjustConfiguration(), PL_ForTest::AdjustConfiguration(), and PL_ForTest::FindLocalPath(). Here is the call graph for this function: 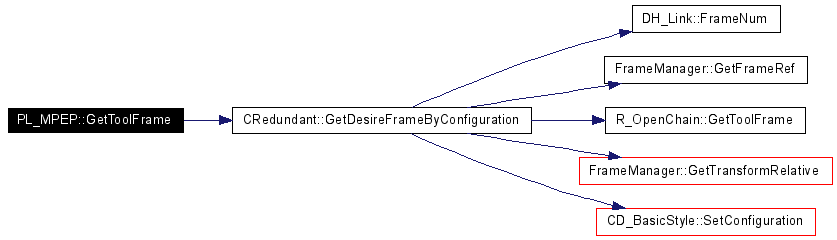 |
|
||||||||||||||||
|
Definition at line 214 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, Pose_Node::conf, ConnectNode(), exploreNum, GetRandomConfiguration(), Pose_Node::graph, CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), Pose_Node::poses, poses, tree, and vertices. Referenced by Planner_IMP_Greedy(), and Planner_SMG_Greedy(). Here is the call graph for this function: 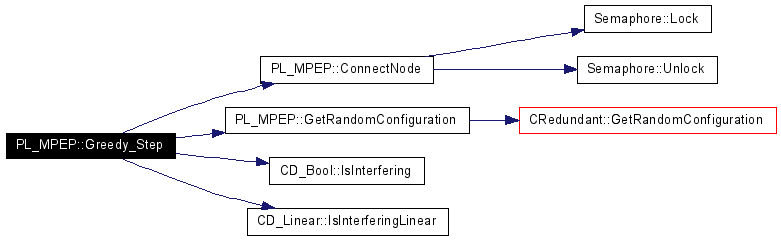 |
|
|
Definition at line 1473 of file PL_MPEP.cpp. References _FIRST_POSE, ClearTree(), PL_HasCollisionDetector::collisionDetector, Pose_Node::conf, ERROR_START_CONFIG_INVALID, CRedundant::GetRandomConfiguration(), PlannerBase::GetStartConfig(), PlannerBase::guid, CD_Bool::IsInterfering(), poses, Pose_Node::poses, randomRetry, redundant, and usingStartConfig. Referenced by Planner_Greedy(), Planner_IMP_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_Greedy(), Planner_SMG_RRT_Connect_Like(), and Planner_SMG_RRT_Greedy_Like(). Here is the call graph for this function: 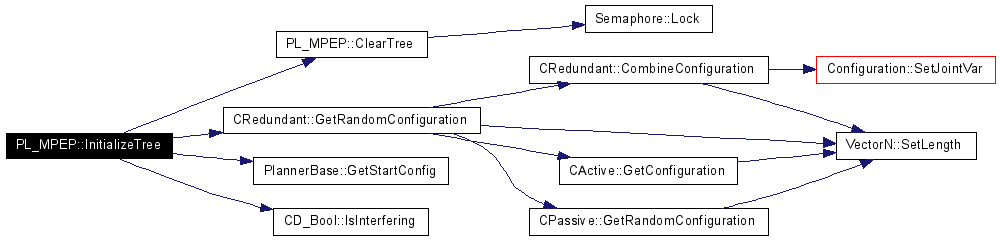 |
|
|
Reimplemented in PL_ForTest. Definition at line 300 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::JointMin(), and m_nDof. Referenced by Extend_Node_Self_Motion_Graph_Jacobian(). Here is the call graph for this function:  |
|
|
Implements PlannerBase. Reimplemented in PL_ForTest. Definition at line 116 of file PL_MPEP.cpp. References PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, ERROR_OK, ERROR_START_CONFIG_INVALID, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), PlannerBase::goalConfig, CD_Bool::IsInterfering(), m_pJacobian, m_pRobot, numTotalNode, PL_Boolean_Output::path, PlannerBase::startConfig, and usingStartConfig. Referenced by RRT_TrajPlanner::Plan(). Here is the call graph for this function: 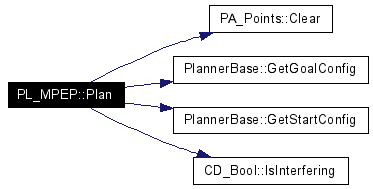 |
|
|
Definition at line 1036 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, goalPoseVertex, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, RetrievePathFromTree(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function:  |
|
|
Definition at line 968 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, goalPoseVertex, Greedy_Step(), PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, RetrievePathFromTree(), tree, usingGoalTree, and vertices. Here is the call graph for this function:  |
|
|
Definition at line 1144 of file PL_MPEP.cpp. References _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, extendNum, goalPoseVertex, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, RetrievePathFromTree(), RRT_Extend_Like(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function:  |
|
|
Definition at line 1269 of file PL_MPEP.cpp. References _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, extendNum, GetClosestPoseVert(), goalPoseVertex, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, Pose_Node::poses, RetrievePathFromTree(), RRT_Extend_Like(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function:  |
|
|
Definition at line 1202 of file PL_MPEP.cpp. References _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, extendNum, GetClosestPoseVert(), goalPoseVertex, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, Pose_Node::poses, RetrievePathFromTree(), RRT_Extend_Like(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function: 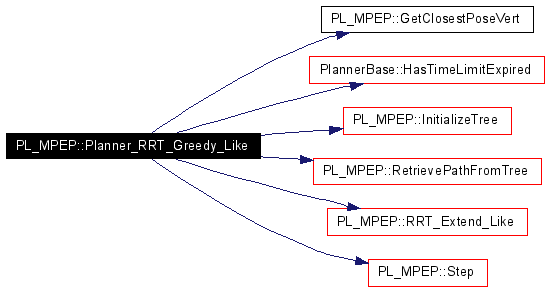 |
|
|
Definition at line 1090 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, extendNum, goalPoseVertex, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, RetrievePathFromTree(), RRT_Extend_Like(), tree, usingGoalTree, and vertices. Here is the call graph for this function: 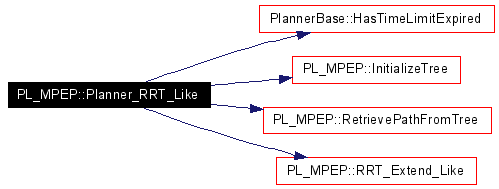 |
|
|
Definition at line 880 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, Establish_Self_Motion_Graph(), PlannerBase::GetTimeElapsedInSeconds(), goalPoseVertex, Greedy_Step(), PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, LogMessage, numFinalSMGNode, numFinalSMGraph, numSMGNode, numSMGraph, RetrievePathFromTree(), tree, usingGoalTree, and vertices. Here is the call graph for this function: 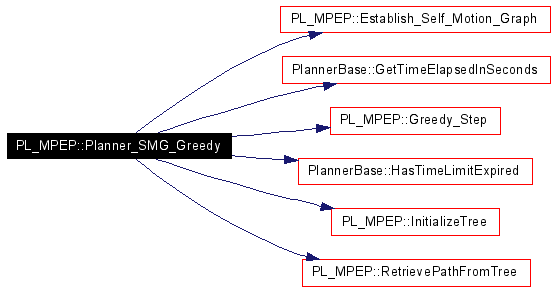 |
|
|
Definition at line 620 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, CheckConnectivity(), ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, extendNum, goal_tree, goal_vertices, goalPoseVertex, goalPoseVertex2, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, RetrievePathFromTree(), RRT_Extend_Like(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function: 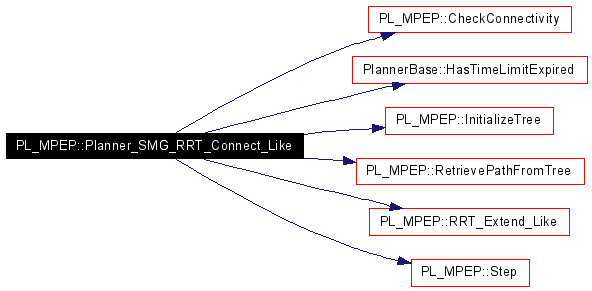 |
|
|
Definition at line 778 of file PL_MPEP.cpp. References _FIRST_POSE, _LAST_POSE, ERROR_OK, ERROR_PLANNING_TIMEOUT, ERROR_RRT_EXTEND_FAILURE, Establish_Self_Motion_Graph(), extendNum, goalPoseVertex, goalPoseVertex2, PlannerBase::HasTimeLimitExpired(), InitializeTree(), iterationNum, LogMessage, numFinalSMGNode, numFinalSMGraph, numSMGNode, numSMGraph, RetrievePathFromTree(), RRT_Extend_Like(), Step(), tree, usingGoalTree, and vertices. Here is the call graph for this function: 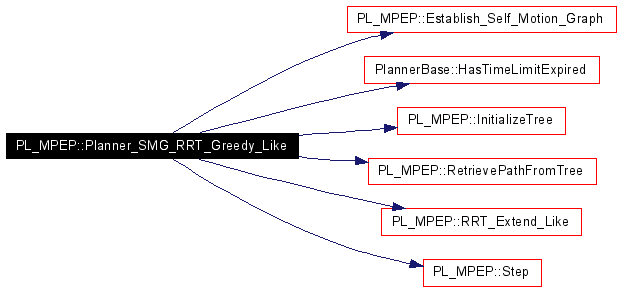 |
|
|
Definition at line 1613 of file PL_MPEP.cpp. References PA_Points::AppendPoint(), goal_tree, goalPoseVertex, goalPoseVertex2, itinerary, numSMGNodeInPath, numSMGraphInPath, numTotalNode, PL_Boolean_Output::path, tree, usingGoalTree, and vertices. Referenced by Planner_Greedy(), Planner_IMP_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_Greedy(), Planner_SMG_RRT_Connect_Like(), and Planner_SMG_RRT_Greedy_Like(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Definition at line 1323 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, Pose_Node::conf, distTolerance, CRedundant::GetConfigurationByActive(), GetConfigurationByDirection(), GetNearestNodeInTree(), GetRandomConfiguration(), CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), Pose_Node::poses, poses, and redundant. Referenced by Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_RRT_Connect_Like(), and Planner_SMG_RRT_Greedy_Like(). Here is the call graph for this function: 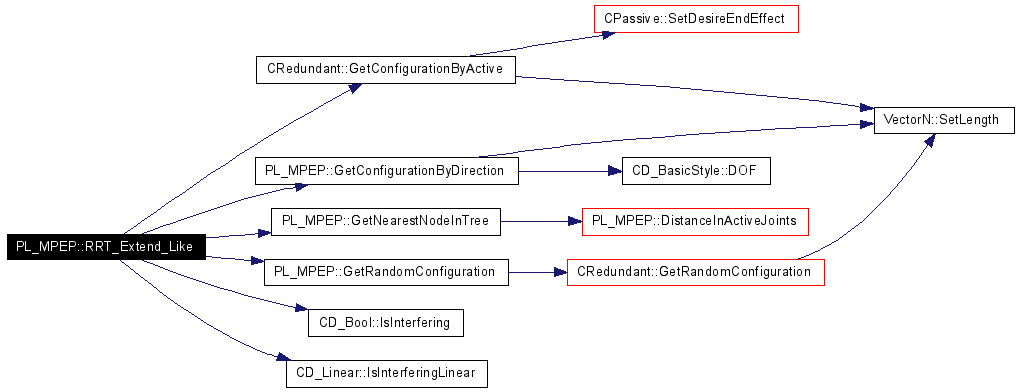 |
|
|
Definition at line 1864 of file PL_MPEP.cpp. References algorithm. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Reimplemented from PL_HasCollisionDetector. Reimplemented in PL_ForTest. Definition at line 1797 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), m_frEndEffector, m_nDof, m_nToolFrame, m_pJacobian, m_pRobot, redundant, CRedundant::SetActiveBaseFrame(), CRedundant::SetActiveFirstJoint(), CRedundant::SetActiveLastJoint(), CRedundant::SetCollisionDetector(), PL_HasCollisionDetector::SetCollisionDetector(), CRedundant::SetFrameManager(), CRedundant::SetPassiveBaseFrame(), CRedundant::SetPassiveFirstJoint(), and CRedundant::SetPassiveLastJoint(). Referenced by ServerBase::RefreshPlanner(), PL_ForTest::SetCollisionDetector(), and RRT_TrajPlanner::SetCollisionDetector(). Here is the call graph for this function: 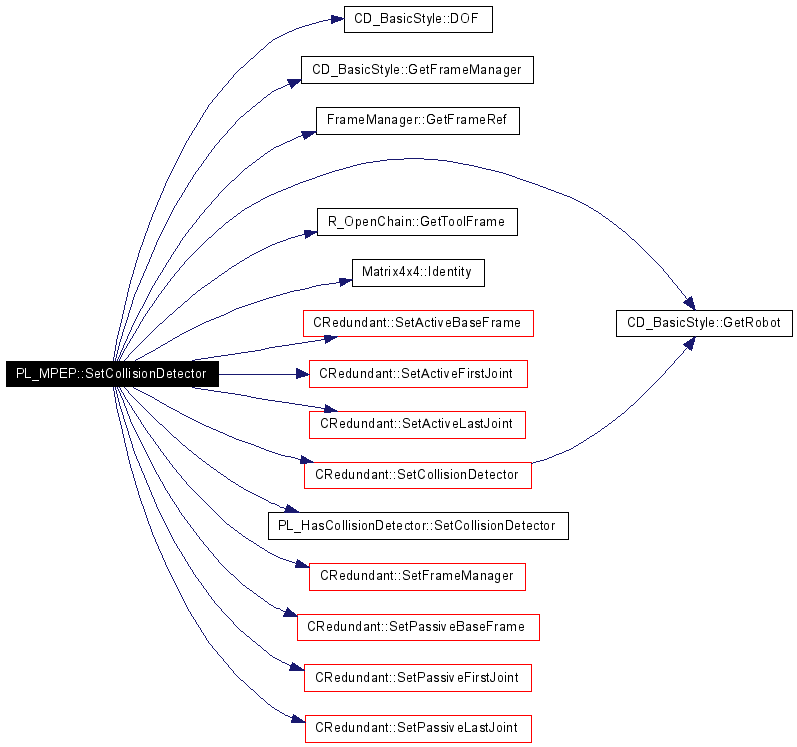 |
|
|
Definition at line 1840 of file PL_MPEP.cpp. References exploreNum. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Definition at line 1845 of file PL_MPEP.cpp. References extendNum. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Definition at line 1835 of file PL_MPEP.cpp. References iterationNum. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Definition at line 1850 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), passiveNum, redundant, CRedundant::SetActiveBaseFrame(), CRedundant::SetActiveFirstJoint(), CRedundant::SetActiveLastJoint(), CRedundant::SetPassiveBaseFrame(), CRedundant::SetPassiveFirstJoint(), and CRedundant::SetPassiveLastJoint(). Referenced by RRT_TrajPlanner::Plan(). Here is the call graph for this function: 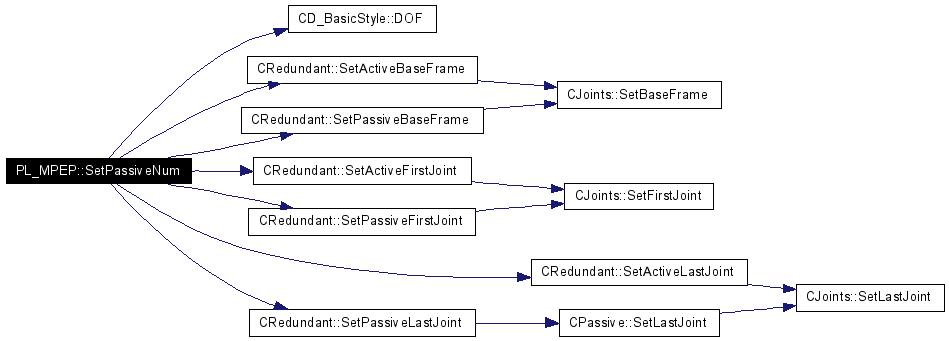 |
|
|
Definition at line 1898 of file PL_MPEP.cpp. Referenced by RRT_TrajPlanner::Plan(). |
|
|
|
|
|
Definition at line 1883 of file PL_MPEP.cpp. References distTolerance. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Definition at line 1869 of file PL_MPEP.cpp. References poses. Referenced by RRT_TrajPlanner::SetTrajectory(). |
|
|
Definition at line 1893 of file PL_MPEP.cpp. References usingGoalConfig. Referenced by RRT_TrajPlanner::Plan(). |
|
|
Definition at line 1878 of file PL_MPEP.cpp. References usingJacobianExt. |
|
|
Definition at line 1888 of file PL_MPEP.cpp. References usingStartConfig. Referenced by RRT_TrajPlanner::Plan(). |
|
||||||||||||||||||||||||||||
|
Definition at line 1367 of file PL_MPEP.cpp. References PL_HasCollisionDetector::collisionDetector, Pose_Node::conf, ConnectNode(), exploreNum, GetRandomConfiguration(), Pose_Node::graph, CD_Bool::IsInterfering(), CD_Linear::IsInterferingLinear(), Pose_Node::poses, and poses. Referenced by Planner_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_SMG_RRT_Connect_Like(), and Planner_SMG_RRT_Greedy_Like(). Here is the call graph for this function:  |
|
|
Definition at line 222 of file PL_MPEP.h. Referenced by PL_MPEP(), and SetAlgorithm(). |
|
|
Definition at line 229 of file PL_MPEP.h. Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), GetRandomConfiguration(), PL_MPEP(), RRT_Extend_Like(), and SetTolerance(). |
|
|
Definition at line 226 of file PL_MPEP.h. Referenced by Greedy_Step(), PL_MPEP(), SetExploreNum(), and Step(). |
|
|
Definition at line 225 of file PL_MPEP.h. Referenced by PL_MPEP(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_RRT_Connect_Like(), Planner_SMG_RRT_Greedy_Like(), and SetExtendNum(). |
|
|
Definition at line 211 of file PL_MPEP.h. Referenced by Planner_SMG_RRT_Connect_Like(), and RetrievePathFromTree(). |
|
|
Definition at line 212 of file PL_MPEP.h. Referenced by Planner_SMG_RRT_Connect_Like(). |
|
|
Definition at line 195 of file PL_MPEP.h. Referenced by Planner_Greedy(), Planner_IMP_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_Greedy(), Planner_SMG_RRT_Connect_Like(), Planner_SMG_RRT_Greedy_Like(), and RetrievePathFromTree(). |
|
|
Definition at line 196 of file PL_MPEP.h. Referenced by Planner_SMG_RRT_Connect_Like(), Planner_SMG_RRT_Greedy_Like(), and RetrievePathFromTree(). |
|
|
Definition at line 227 of file PL_MPEP.h. Referenced by PL_MPEP(), Planner_Greedy(), Planner_IMP_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_Greedy(), Planner_SMG_RRT_Connect_Like(), Planner_SMG_RRT_Greedy_Like(), and SetIterationNum(). |
|
|
Definition at line 215 of file PL_MPEP.h. Referenced by RetrievePathFromTree(). |
|
|
Reimplemented in PL_ForTest. Definition at line 187 of file PL_MPEP.h. Referenced by AdjustConfiguration(), and SetCollisionDetector(). |
|
|
Reimplemented in PL_ForTest. Definition at line 185 of file PL_MPEP.h. Referenced by AdjustConfiguration(), Extend_Node_Self_Motion_Graph_Jacobian(), IsJointWithinLimits(), and SetCollisionDetector(). |
|
|
Reimplemented in PL_ForTest. Definition at line 186 of file PL_MPEP.h. Referenced by SetCollisionDetector(). |
|
|
Reimplemented in PL_ForTest. Definition at line 188 of file PL_MPEP.h. Referenced by AdjustConfiguration(), Extend_Node_Self_Motion_Graph_Jacobian(), PL_MPEP(), Plan(), SetCollisionDetector(), and ~PL_MPEP(). |
|
|
Reimplemented in PL_ForTest. Definition at line 184 of file PL_MPEP.h. Referenced by Plan(), and SetCollisionDetector(). |
|
|
Definition at line 223 of file PL_MPEP.h. Referenced by DistanceInActiveJoints(), GetConfigurationByDirection(), PL_MPEP(), and SetPassiveNum(). |
|
|
Definition at line 219 of file PL_MPEP.h. Referenced by AdjustConfiguration(), PL_ForTest::AdjustConfiguration(), Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), PL_ForTest::FindLocalPath(), PL_ForTest::FindLocalPath2(), Greedy_Step(), InitializeTree(), RRT_Extend_Like(), SetTrajectory(), and Step(). |
|
|
Definition at line 224 of file PL_MPEP.h. Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), Extend_Node_Self_Motion_Graph_Jacobian(), PL_ForTest::Extend_Node_Self_Motion_Graph_Jacobian(), InitializeTree(), and PL_MPEP(). |
|
|
Definition at line 192 of file PL_MPEP.h. Referenced by Extend_Node_Self_Motion_Graph(), PL_ForTest::Extend_Node_Self_Motion_Graph(), GetRandomConfiguration(), GetToolFrame(), InitializeTree(), RRT_Extend_Like(), SetCollisionDetector(), and SetPassiveNum(). |
|
|
Definition at line 228 of file PL_MPEP.h. Referenced by Establish_Self_Motion_Graph(), PL_ForTest::Establish_Self_Motion_Graph(), PL_ForTest::PL_ForTest(), and PL_MPEP(). |
|
|
|
|
|
|
Definition at line 231 of file PL_MPEP.h. Referenced by PL_MPEP(), PL_ForTest::Plan(), and SetUsingGoalConfig(). |
|
|
Definition at line 232 of file PL_MPEP.h. Referenced by PL_MPEP(), Planner_Greedy(), Planner_IMP_Greedy(), Planner_RRT_Connect_Like(), Planner_RRT_Greedy_Connect(), Planner_RRT_Greedy_Like(), Planner_RRT_Like(), Planner_SMG_Greedy(), Planner_SMG_RRT_Connect_Like(), Planner_SMG_RRT_Greedy_Like(), and RetrievePathFromTree(). |
|
|
Definition at line 233 of file PL_MPEP.h. Referenced by Establish_Self_Motion_Graph(), PL_MPEP(), and SetUsingJacobianExt(). |
|
|
Definition at line 230 of file PL_MPEP.h. Referenced by InitializeTree(), PL_MPEP(), Plan(), PL_ForTest::Plan(), and SetUsingStartConfig(). |
|
 1.4.6-NO
1.4.6-NO