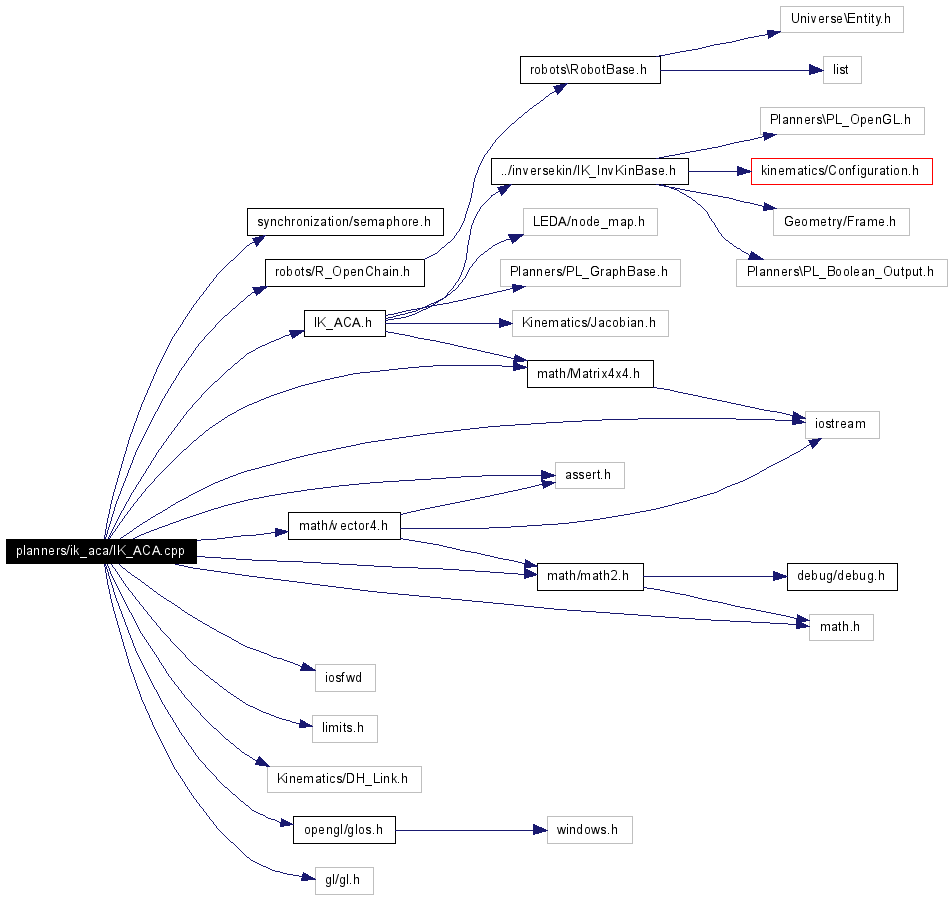
#include "synchronization/semaphore.h"#include "robots/R_OpenChain.h"#include "IK_ACA.h"#include <assert.h>#include <math.h>#include <math/math2.h>#include <math/vector4.h>#include <math/matrix4x4.h>#include <iosfwd>#include <iostream>#include <limits.h>#include "Kinematics/DH_Link.h"#include "opengl/glos.h"#include <gl/gl.h>Include dependency graph for IK_ACA.cpp:
Go to the source code of this file.
Defines | |
| #define | _USE_ORIENTATION_ |
Variables | |
| static const char | FILEEXT [] = ".ikaca" |
| static const char | FILEHEADER [] = "INVERSE_ACA_PLANNER" |
| static const Vector4 | PX (1, 0, 0) |
| static const Vector4 | PY (0, 1, 0) |
| static const Vector4 | PZ (0, 0, 1) |
| static const double | INFINITY = LONG_MAX |
| static const double | DEFAULT_TOL = 0.02 |
| static const double | DEFAULT_TOL1 = 0.005 |
| static const int | DEFAULT_EMBRYOS_PER_NODE = 3 |
| static const double | SAMPLING_TIME = 0.5 |
|
|
Definition at line 52 of file IK_ACA.cpp. |
|
|
Definition at line 49 of file IK_ACA.cpp. Referenced by IK_ACA::IK_ACA(). |
|
|
Definition at line 47 of file IK_ACA.cpp. |
|
|
Definition at line 48 of file IK_ACA.cpp. Referenced by IK_ACA::Search(), and IK_ACA::Search1(). |
|
|
Definition at line 40 of file IK_ACA.cpp. |
|
|
Definition at line 41 of file IK_ACA.cpp. |
|
|
Definition at line 46 of file IK_ACA.cpp. Referenced by IK_ACA::Explore(), IK_Jacobian::GetClosestValues(), and IK_ACA::InitBestParams(). |
|
|
Referenced by PL_PRM_ClosedChain::Error1(), IK_ACA::FindJointAdjust(), and IK_ACA::FrameDistance(). |
|
|
Referenced by PL_PRM_ClosedChain::Error1(), IK_ACA::FindJointAdjust(), and IK_ACA::FrameDistance(). |
|
|
Referenced by PL_RGD_PRM::Error1(), PL_PRM_ClosedChain::Error1(), IK_ACA::FindJointAdjust(), and IK_ACA::FrameDistance(). |
|
|
Definition at line 50 of file IK_ACA.cpp. Referenced by IK_ACA::GetNextConfig(). |
 1.4.6-NO
1.4.6-NO