| ::sfu>ensc>ramp>mpk>development | ||||||||||||||||
|
Repository Documents Development Create Scenes Releases To-Do list Bugs reports FAQs |
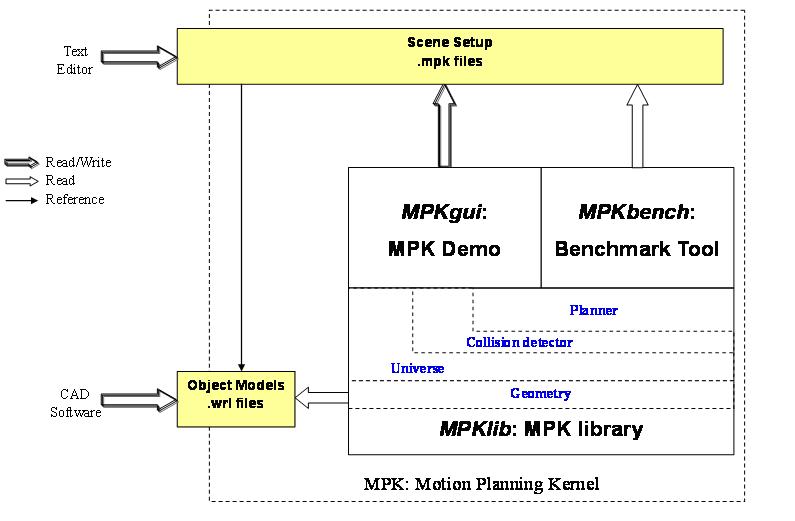
Developing MPKPrograming toolsMPK has been developed with Miscrosoft Visual C++ 6.0 . Currently MPK only supports this version in Windows platform. If you are using later version of Visual Studio (such as Visual Studio 2003/2005) there wil be many compile erros.Projects and directory structureThe following figure shows compoents of MPK, and they are located in different directories, as shown in Table I.
Table I. MPK directory structure.
For a detailed version of the structure see here. Compile and build the projectsTo build these components (MPKlib, MPKgui, and MPKbench), simply go the corresponding directories and open the dsw file and rebuild. All dependent files have been included in the workspace.Make changesNow, it comes to the exciting part. In general, if you are working on a path planner, the change will be fairly simple, as there are all different kinds of planners to derive from. |
|||||||||||||||
| Updated on May 10, 2007 by Zhenwang Yao . | ||||||||||||||||
|
|
|
|