#include <smoothers/SM_PathSmoothingRandomNodePair.h>
Inherits SmootherBase.
Inherited by SM_SuccessiveAndRandomSmoothing.
Inheritance diagram for SM_PathSmoothingRandomNodePair:
Public Member Functions | |
| SM_PathSmoothingRandomNodePair () | |
| virtual | ~SM_PathSmoothingRandomNodePair () |
| virtual void | Smooth () |
Protected Member Functions | |
| double | Distance (const Configuration &conf1, const Configuration &conf2) const |
| int | Random (const int min, const int max) const |
| void | UpdatePoints (const int index1, const int index2) |
Protected Attributes | |
| std::vector< Configuration > | m_Points |
Definition at line 8 of file SM_PathSmoothingRandomNodePair.h.
|
|
Definition at line 10 of file SM_PathSmoothingRandomNodePair.cpp. |
|
|
Definition at line 21 of file SM_PathSmoothingRandomNodePair.cpp. |
|
||||||||||||
|
Definition at line 95 of file SM_PathSmoothingRandomNodePair.cpp. References CD_JointLimits::DistanceBetween(), and SmootherBase::m_CollisionDetector. Here is the call graph for this function: 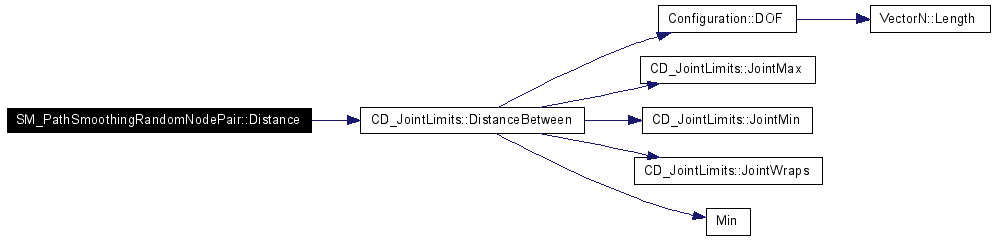 |
|
||||||||||||
|
Definition at line 100 of file SM_PathSmoothingRandomNodePair.cpp. |
|
|
Implements SmootherBase. Reimplemented in SM_SuccessiveAndRandomSmoothing. Definition at line 30 of file SM_PathSmoothingRandomNodePair.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), SmootherBase::m_PathToSmooth, m_Points, SmootherBase::m_SmoothedPath, and PA_Points::Size(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 105 of file SM_PathSmoothingRandomNodePair.cpp. References m_Points. |
|
|
Definition at line 21 of file SM_PathSmoothingRandomNodePair.h. Referenced by SM_SuccessiveAndRandomSmoothing::PathSmoothing(), Smooth(), and UpdatePoints(). |
 1.4.6-NO
1.4.6-NO