#include <planners/inversekin/Joints.h>
Inherited by CActive, and CPassive.
Inheritance diagram for CJoints:
Public Member Functions | |
| CJoints () | |
| CJoints (FrameManager *frameManager) | |
| virtual | ~CJoints () |
| virtual void | SetRobot (R_OpenChain *robot) |
| virtual void | SetFrameManager (FrameManager *frameManager) |
| virtual void | SetBaseFrame (unsigned int frame) |
| virtual void | SetFirstJoint (unsigned int joint) |
| virtual void | SetLastJoint (unsigned int joint) |
| virtual bool | GetConfiguration (Configuration &conf)=0 |
| virtual bool | GetConfiguration (Configuration &conf, Configuration ¤t, double dist)=0 |
Public Attributes | |
| unsigned int | jointNum |
Protected Member Functions | |
| virtual double | Distance (LinkBase *link, double q1, double q2) |
Protected Attributes | |
| R_OpenChain * | robot |
| std::vector< LinkBase * > | links |
| FrameManager * | frameManager |
| unsigned int | baseFrame |
| unsigned int | firstJoint |
| unsigned int | lastJoint |
Definition at line 15 of file Joints.h.
|
|
Definition at line 34 of file Joints.cpp. References baseFrame, firstJoint, jointNum, and lastJoint. |
|
|
Definition at line 39 of file Joints.cpp. References baseFrame, firstJoint, jointNum, and lastJoint. |
|
|
Definition at line 45 of file Joints.cpp. |
|
||||||||||||||||
|
Definition at line 62 of file Joints.cpp. References LinkBase::JointMax(), LinkBase::JointMin(), LinkBase::JointWraps(), and Min(). Referenced by CPassive::GetConfiguration(). Here is the call graph for this function: 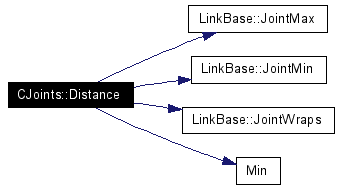 |
|
||||||||||||||||
|
|
|
|
|
|
|
Definition at line 112 of file Joints.cpp. References baseFrame. Referenced by CRedundant::SetActiveBaseFrame(), and CRedundant::SetPassiveBaseFrame(). |
|
|
Definition at line 122 of file Joints.cpp. References firstJoint. Referenced by CRedundant::SetActiveFirstJoint(), and CRedundant::SetPassiveFirstJoint(). |
|
|
Definition at line 102 of file Joints.cpp. References frameManager. Referenced by CRedundant::SetFrameManager(). |
|
|
Reimplemented in CPassive. Definition at line 132 of file Joints.cpp. References firstJoint, jointNum, and lastJoint. Referenced by CRedundant::SetActiveLastJoint(), and CPassive::SetLastJoint(). |
|
|
Reimplemented in CPassive. Definition at line 86 of file Joints.cpp. References R_OpenChain::GetAllLinks(), links, and robot. Referenced by CRedundant::SetCollisionDetector(), and CPassive::SetRobot(). Here is the call graph for this function:  |
|
|
Definition at line 41 of file Joints.h. Referenced by CJoints(), and SetBaseFrame(). |
|
|
Definition at line 42 of file Joints.h. Referenced by CJoints(), CPassive::GetConfiguration(), CActive::GetConfiguration(), CPassive::GetRandomConfiguration(), CPassive::Inverse(), CPassive::ResolveJoints(), SetFirstJoint(), and SetLastJoint(). |
|
|
Definition at line 40 of file Joints.h. Referenced by SetFrameManager(), and CPassive::SetRobot(). |
|
|
Definition at line 34 of file Joints.h. Referenced by CJoints(), CPassive::GetConfiguration(), CActive::GetConfiguration(), CPassive::GetRandomConfiguration(), CPassive::Inverse(), CRedundant::SetActiveLastJoint(), CPassive::SetLastJoint(), SetLastJoint(), and CRedundant::SetPassiveLastJoint(). |
|
|
Definition at line 43 of file Joints.h. Referenced by CJoints(), CActive::GetConfiguration(), and SetLastJoint(). |
|
|
Definition at line 38 of file Joints.h. Referenced by CPassive::GetConfiguration(), CActive::GetConfiguration(), CPassive::GetRandomConfiguration(), CPassive::Inverse(), CPassive::ResolveJoints(), and SetRobot(). |
|
|
Definition at line 37 of file Joints.h. Referenced by CPassive::SetRobot(), and SetRobot(). |
 1.4.6-NO
1.4.6-NO