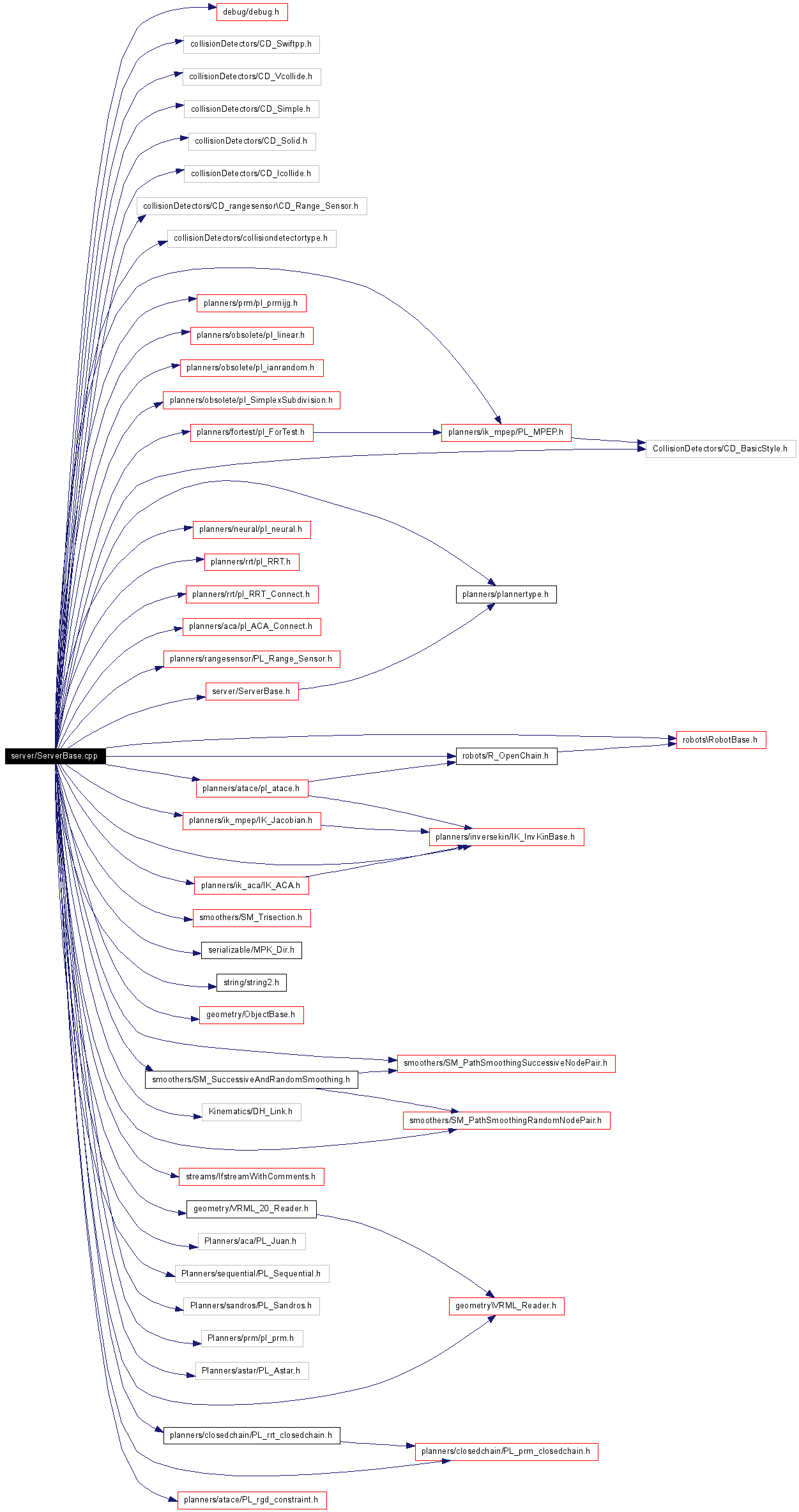
#include "debug/debug.h"#include <collisionDetectors/CD_Swiftpp.h>#include <collisionDetectors/CD_Vcollide.h>#include <collisionDetectors/CD_Simple.h>#include <collisionDetectors/CD_Solid.h>#include <collisionDetectors/CD_Icollide.h>#include <collisionDetectors/CD_rangesensor\CD_Range_Sensor.h>#include <collisionDetectors/collisiondetectortype.h>#include <planners/plannertype.h>#include <planners/prm/pl_prmijg.h>#include <planners/obsolete/pl_linear.h>#include <planners/obsolete/pl_ianrandom.h>#include <planners/obsolete/pl_SimplexSubdivision.h>#include <planners/fortest/pl_ForTest.h>#include <planners/neural/pl_neural.h>#include <planners/rrt/pl_RRT.h>#include <planners/rrt/pl_RRT_Connect.h>#include <planners/aca/pl_ACA_Connect.h>#include <planners/rangesensor/PL_Range_Sensor.h>#include <planners/ik_mpep/pl_mpep.h>#include <planners/atace/pl_atace.h>#include <smoothers/SM_PathSmoothingSuccessiveNodePair.h>#include <smoothers/SM_PathSmoothingRandomNodePair.h>#include <smoothers/SM_SuccessiveAndRandomSmoothing.h>#include <smoothers/SM_Trisection.h>#include <robots/robotbase.h>#include <serializable/MPK_Dir.h>#include <string/string2.h>#include "CollisionDetectors/CD_BasicStyle.h"#include "geometry/ObjectBase.h"#include "geometry/VRML_20_Reader.h"#include "geometry/VRML_Reader.h"#include "Kinematics/DH_Link.h"#include "robots/R_OpenChain.h"#include "server/ServerBase.h"#include "streams/IfstreamWithComments.h"#include "planners/ik_mpep/IK_Jacobian.h"#include "planners/inversekin/IK_InvKinBase.h"#include "Planners/aca/PL_Juan.h"#include "Planners/sequential/PL_Sequential.h"#include "Planners/sandros/PL_Sandros.h"#include "Planners/prm/pl_prm.h"#include "Planners/astar/PL_Astar.h"#include "planners/ik_aca/IK_ACA.h"#include "planners/closedchain/PL_prm_closedchain.h"#include "planners/closedchain/PL_rrt_closedchain.h"#include "planners/atace/PL_rgd_constraint.h"Include dependency graph for ServerBase.cpp:
Go to the source code of this file.
 1.4.6-NO
1.4.6-NO