#include <planners/atace/PL_ATACE.h>
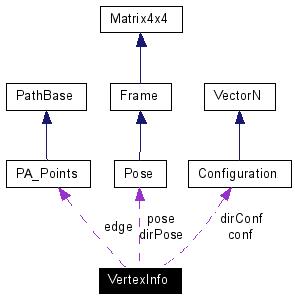
Collaboration diagram for VertexInfo:
Public Attributes | |
| int | flag |
| bool | collisionChecked |
| Pose | pose |
| Configuration | conf |
| Pose | dirPose |
| Configuration | dirConf |
| Path | edge |
| EEPath | eeEdge |
Definition at line 71 of file PL_ATACE.h.
|
|
Definition at line 74 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 76 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), PL_ATACE::CreateTree(), PL_ATACE::DrawExplicit(), PL_ATACE::FindClosestInTree(), PL_ATACE::GetConfigurationFromTree(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 78 of file PL_ATACE.h. |
|
|
Definition at line 77 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(). |
|
|
Definition at line 79 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), and PL_ATACE::GetPathFromTree(). |
|
|
Definition at line 80 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 73 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), PL_ATACE::CreateTree(), PL_ATACE::DrawExplicit(), and PL_ATACE::FindClosestInTree(). |
|
|
Definition at line 75 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), PL_ATACE::CreateTree(), PL_ATACE::DrawExplicit(), PL_ATACE::FindClosestInTree(), and PL_ATACE::GetPoseFromTree(). |
 1.4.6-NO
1.4.6-NO