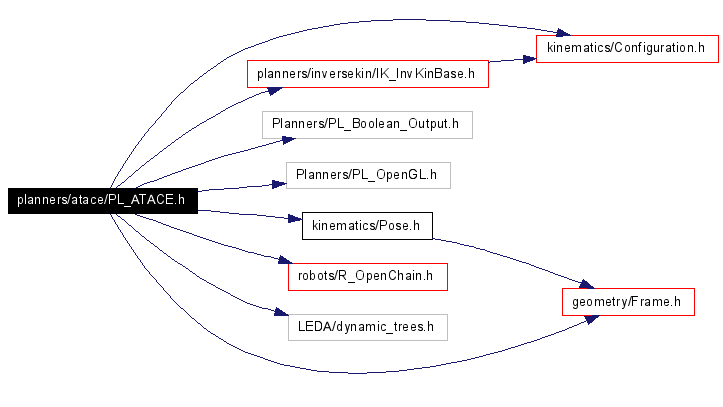
#include "kinematics/Configuration.h"#include "geometry/Frame.h"#include "Planners/PL_Boolean_Output.h"#include "Planners/PL_OpenGL.h"#include "planners/inversekin/IK_InvKinBase.h"#include "robots/R_OpenChain.h"#include <LEDA/dynamic_trees.h>#include "kinematics/Pose.h"Include dependency graph for PL_ATACE.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | Node |
| struct | VertexInfo |
| class | PL_ATACE |
Defines | |
| #define | ERR_FAIL 0xff |
| #define | ERR_SUCCESS 0x00 |
| #define | ERR_TIMEOUT 0x10 |
| #define | ERR_ILLPARAMETER 0x20 |
| #define | FLAG_NEW 0x01 |
| #define | FLAG_OBSOLETE 0x02 |
| #define | TYPE_START_CONF 0x01 |
| #define | TYPE_START_POSE 0x02 |
| #define | TYPE_GOAL_CONF 0x04 |
| #define | TYPE_GOAL_POSE 0x08 |
| #define | FLAG_C_METRICS 0x10 |
| #define | FLAG_P_METRICS 0x01 |
| #define | FLAG_B_METRICS (FLAG_C_METRICS|FLAG_P_METRICS) |
| #define | LOCAL_JACOBIAN 0 |
| #define | LOCAL_RRT 1 |
Typedefs | |
| typedef PA_Points | Path |
| typedef vertex | Vertex |
| typedef std::vector< Frame > | EEPath |
| typedef bool(* | ProcIsStaified )(Frame &pose) |
| typedef void(* | ProcAdjustToSatisfy )(Frame &pose) |
| typedef void(* | ProcGetVelocity )(Frame &pose, VectorN &vel) |
| typedef void(* | ProcGetDirectedVelocity )(Frame &pose, Frame &dir, VectorN &vel, Frame &projection, bool greedy, double timeInterval) |
|
|
Definition at line 11 of file PL_ATACE.h. Referenced by PL_RRT_ClosedChain::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoalJacobian(), PL_RRT_ClosedChain::Extend(), PL_RGD_RRT::Extend(), PL_ATACE::ExtendToGoal(), PL_RRT_ClosedChain::Plan(), PL_RGD_RRT::Plan(), and PL_ATACE::Plan(). |
|
|
Definition at line 14 of file PL_ATACE.h. |
|
|
Definition at line 12 of file PL_ATACE.h. Referenced by PL_RRT_ClosedChain::ConnectToGoal(), PL_RGD_RRT::ConnectToGoal(), PL_RRT_ClosedChain::ConnectToGoal2(), PL_RRT_ClosedChain::Extend(), PL_RGD_RRT::Extend(), PL_ATACE::ExtendToGoal(), PL_RRT_ClosedChain::Plan(), PL_RGD_RRT::Plan(), and PL_ATACE::Plan(). |
|
|
Definition at line 13 of file PL_ATACE.h. Referenced by PL_RRT_ClosedChain::Plan(), PL_RGD_RRT::Plan(), and PL_ATACE::Plan(). |
|
|
Definition at line 29 of file PL_ATACE.h. |
|
|
Definition at line 27 of file PL_ATACE.h. Referenced by PL_ATACE::FindClosestInTree(). |
|
|
Definition at line 17 of file PL_ATACE.h. Referenced by PL_ATACE::AddNodeInTree(), and PL_ATACE::CreateTree(). |
|
|
Definition at line 18 of file PL_ATACE.h. Referenced by PL_ATACE::ClearTree(), PL_ATACE::DrawExplicit(), and PL_ATACE::FindClosestInTree(). |
|
|
Definition at line 28 of file PL_ATACE.h. Referenced by PL_ATACE::FindClosestInTree(), and PL_ATACE::PL_ATACE(). |
|
|
Definition at line 32 of file PL_ATACE.h. Referenced by PL_ATACE::PL_ATACE(). |
|
|
Definition at line 33 of file PL_ATACE.h. Referenced by PL_ATACE::SetLocalPlanner(). |
|
|
Definition at line 23 of file PL_ATACE.h. Referenced by PL_ATACE::SetProblemType(). |
|
|
Definition at line 24 of file PL_ATACE.h. Referenced by PL_ATACE::SetProblemType(). |
|
|
Definition at line 21 of file PL_ATACE.h. Referenced by PL_ATACE::SetProblemType(). |
|
|
Definition at line 22 of file PL_ATACE.h. Referenced by PL_ATACE::SetProblemType(). |
|
|
Definition at line 58 of file PL_ATACE.h. |
|
|
Definition at line 54 of file PL_ATACE.h. |
|
|
Definition at line 86 of file PL_ATACE.h. |
|
|
Definition at line 88 of file PL_ATACE.h. |
|
|
Definition at line 87 of file PL_ATACE.h. |
|
|
Definition at line 85 of file PL_ATACE.h. |
|
|
Definition at line 57 of file PL_ATACE.h. |
 1.4.6-NO
1.4.6-NO