#include <planners/atace/PL_PRM_Constrained.h>
Inherits IK_Jacobian, and IK_Jacobian.
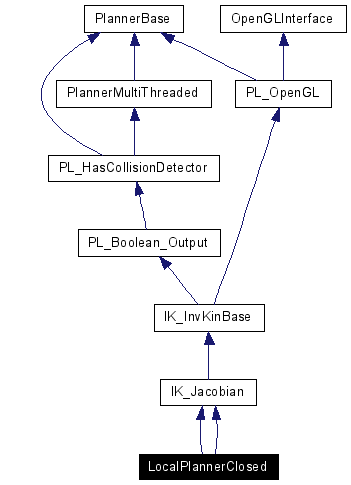
Inheritance diagram for LocalPlannerClosed:
Public Member Functions | |
| LocalPlannerClosed () | |
| ~LocalPlannerClosed () | |
| virtual bool | Plan () |
| LocalPlannerClosed () | |
| ~LocalPlannerClosed () | |
| virtual bool | Plan () |
Protected Member Functions | |
| double | Distance (Configuration &frame1, Configuration &frame2) |
| double | Distance (Configuration &frame1, Configuration &frame2) |
Definition at line 18 of file PL_PRM_Constrained.h.
|
|
Definition at line 21 of file PL_PRM_Constrained.h. |
|
|
Definition at line 22 of file PL_PRM_Constrained.h. |
|
|
Definition at line 28 of file PL_PRM_ClosedChain.h. |
|
|
Definition at line 29 of file PL_PRM_ClosedChain.h. |
|
||||||||||||
|
|
|
||||||||||||
|
Definition at line 1038 of file PL_PRM_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, CD_JointLimits::JointDisplacement(), VectorN::Length(), and Sqr(). Here is the call graph for this function: 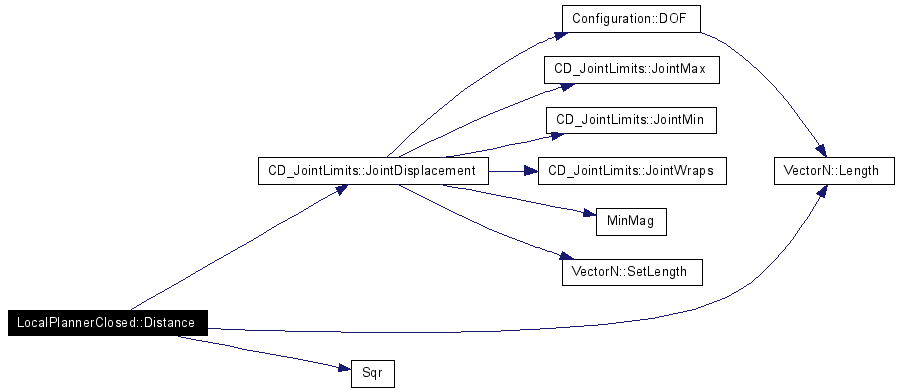 |
|
|
Reimplemented from IK_Jacobian. |
|
|
Reimplemented from IK_Jacobian. Definition at line 1055 of file PL_PRM_Constrained.cpp. References PL_HasCollisionDetector::collisionDetector, PlannerBase::GetStartConfig(), and CD_Bool::IsInterfering(). Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), and PL_PRM_ClosedChain::Plan(). Here is the call graph for this function: 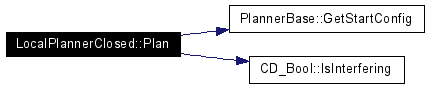 |
 1.4.6-NO
1.4.6-NO