#include <planners/ik_mpep/IK_Jacobian.h>
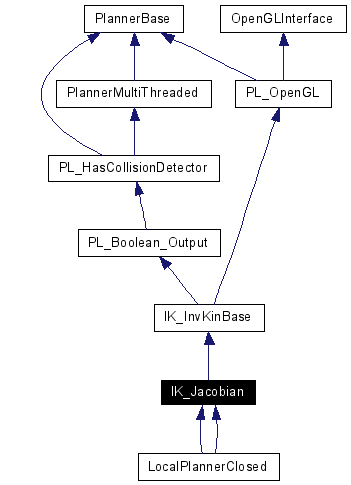
Inherits IK_InvKinBase.
Inherited by LocalPlannerClosed, and LocalPlannerClosed.
Inheritance diagram for IK_Jacobian:
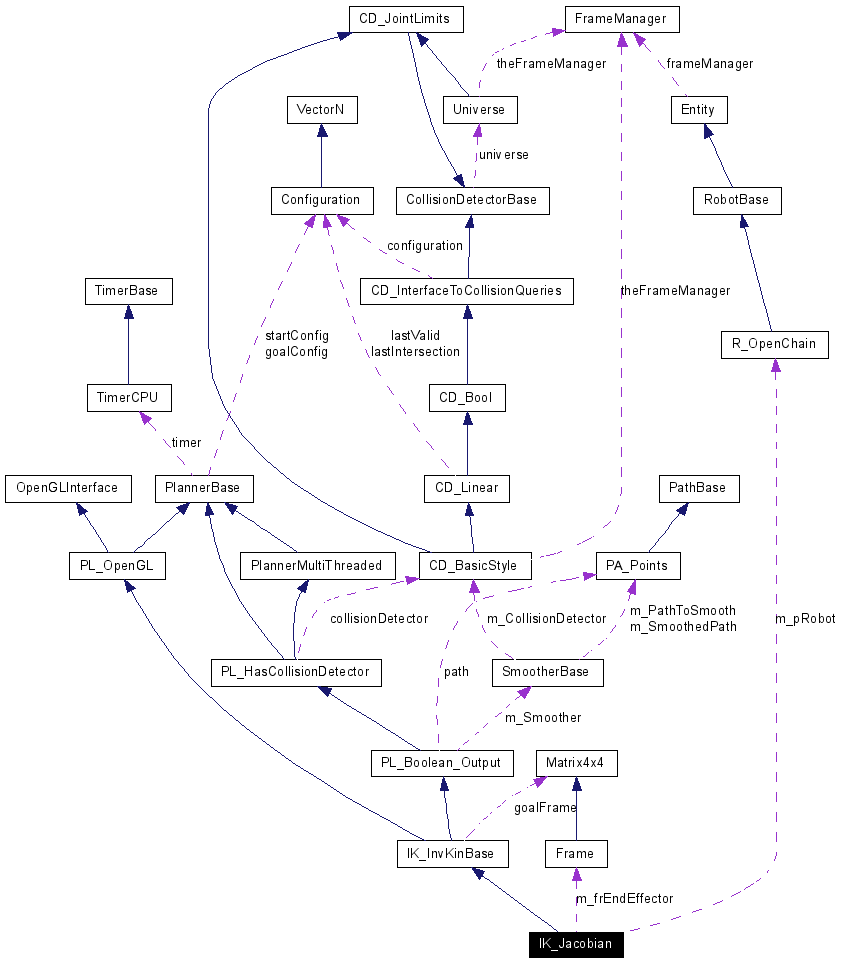
Definition at line 27 of file IK_Jacobian.h.
|
|
Definition at line 47 of file IK_Jacobian.cpp. References PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, DEFAULT_ANG_TOL, DEFAULT_HOMO_GAIN, DEFAULT_OBS_GAIN, DEFAULT_OBS_TOL, DEFAULT_PATH_TOL, CD_BasicStyle::DOF(), FRAMEDOF, m_dAngTol, m_dHomoGain, m_dObsDistGain, m_dObsTol, m_dPathTol, m_nDof, m_nObsPoint, m_vClosestPoints, and PL_Boolean_Output::path. Here is the call graph for this function: 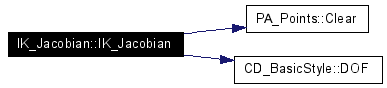 |
|
|
Definition at line 71 of file IK_Jacobian.cpp. References PA_Points::Clear(), m_vClosestPoints, and PL_Boolean_Output::path. Here is the call graph for this function:  |
|
|
Definition at line 667 of file IK_Jacobian.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::JointMin(), and m_nDof. Here is the call graph for this function:  |
|
|
Definition at line 682 of file IK_Jacobian.cpp. References m_nDof, and MAX_JOINT_VEL. |
|
||||||||||||
|
Definition at line 115 of file IK_Jacobian.cpp. References Matrix4x4::Inverse(), m_bOrientation, m_bPosition, ROUNDING_ERROR, VectorN::SetLength(), and Matrix4x4::values. Here is the call graph for this function: 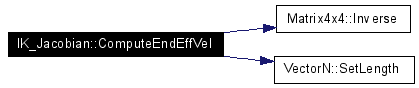 |
|
||||||||||||||||||||
|
Definition at line 196 of file IK_Jacobian.cpp. References CJacobian::GetJointFrame(), CJacobian::GetJointWorldFrame(), CJacobian::GetMatrix(), Frame::GetTranslationVector(), Matrix4x4::Identity(), Matrixmxn::Inverse(), LogMatrix, LogVector, m_dHomoGain, m_dObsDistGain, m_dTotalObsDist, m_nDof, m_nObsPoint, m_vClosestPoints, VectorN::Magnitude(), MAX_OBS_VEL, CJacobian::SetInterestPoint(), SOI_GAIN_DISTANCE, Matrix4x4::Translate(), and UNITY_GAIN_DISTANCE. Here is the call graph for this function: 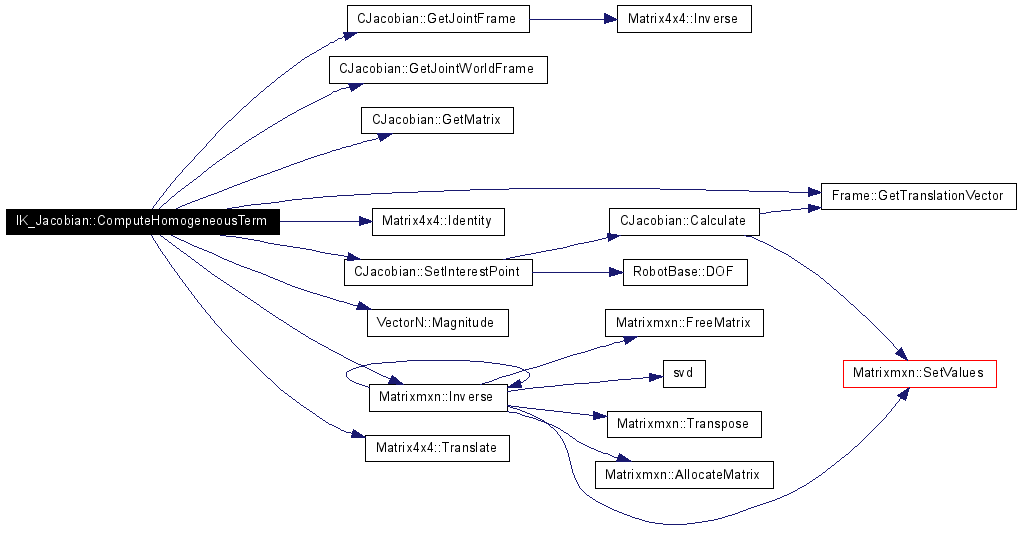 |
|
||||||||||||
|
Definition at line 736 of file IK_Jacobian.cpp. References Frame::GetTranslationVector(), and Vector4::Magnitude(). Here is the call graph for this function: 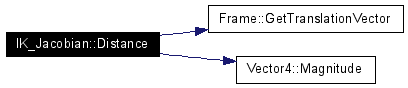 |
|
|
Definition at line 515 of file IK_Jacobian.cpp. References PL_HasCollisionDetector::collisionDetector, closeValues::distance, INFINITY, m_nObsPoint, and m_vClosestPoints. |
|
|
Definition at line 47 of file IK_Jacobian.h. References m_dHomoGain. |
|
|
Definition at line 59 of file IK_Jacobian.h. References m_nObsPoint. |
|
|
Definition at line 51 of file IK_Jacobian.h. References m_dObsDistGain. |
|
|
Definition at line 43 of file IK_Jacobian.h. References m_dObsTol. |
|
|
Definition at line 63 of file IK_Jacobian.h. References m_bOrientation. |
|
|
Definition at line 55 of file IK_Jacobian.h. References m_dPathTol. |
|
|
Definition at line 65 of file IK_Jacobian.h. References m_bPosition. |
|
|
Reimplemented from IK_InvKinBase. Definition at line 486 of file IK_Jacobian.cpp. |
|
|
Reimplemented from IK_InvKinBase. Reimplemented in LocalPlannerClosed, and LocalPlannerClosed. Definition at line 308 of file IK_Jacobian.cpp. References PL_HasCollisionDetector::collisionDetector, PlannerBase::GetStartConfig(), CD_Bool::IsInterfering(), and PlannerBase::StartTimer(). Referenced by Jacobian_TrajPlanner::Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_HasCollisionDetector. Definition at line 84 of file IK_Jacobian.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), m_frEndEffector, m_nDof, m_nToolFrame, and m_pRobot. Referenced by ServerBase::RefreshPlanner(), PL_PRM_ClosedLocalJacobian::SetCollisionDetector(), PL_RGD_PRM::SetCollisionDetector(), PL_PRM_ClosedChain::SetCollisionDetector(), and Jacobian_TrajPlanner::SetCollisionDetector(). Here is the call graph for this function: 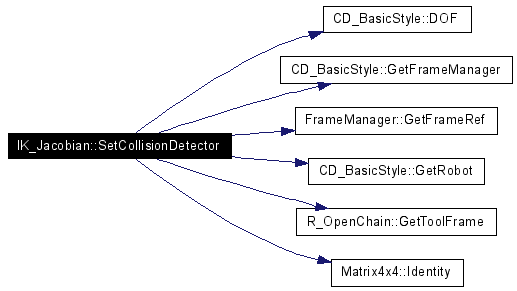 |
|
|
Definition at line 46 of file IK_Jacobian.h. References m_dHomoGain. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 58 of file IK_Jacobian.h. References m_nObsPoint. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 50 of file IK_Jacobian.h. References m_dObsDistGain. |
|
|
Definition at line 490 of file IK_Jacobian.cpp. References PL_HasCollisionDetector::collisionDetector, and m_dObsTol. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 62 of file IK_Jacobian.h. References m_bOrientation. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 54 of file IK_Jacobian.h. References m_dPathTol. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 64 of file IK_Jacobian.h. References m_bPosition. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and Jacobian_TrajPlanner::Plan(). |
|
|
Definition at line 720 of file IK_Jacobian.cpp. References LogMatrix, and poses. Referenced by Jacobian_TrajPlanner::SetTrajectory(). |
|
|
Definition at line 71 of file IK_Jacobian.h. Referenced by ComputeEndEffVel(), GetOrientation(), and SetOrientation(). |
|
|
Definition at line 70 of file IK_Jacobian.h. Referenced by ComputeEndEffVel(), GetPosition(), and SetPosition(). |
|
|
Definition at line 75 of file IK_Jacobian.h. Referenced by IK_Jacobian(). |
|
|
Definition at line 73 of file IK_Jacobian.h. Referenced by ComputeHomogeneousTerm(), GetHomogeneousGain(), IK_Jacobian(), and SetHomogeneousGain(). |
|
|
Definition at line 74 of file IK_Jacobian.h. Referenced by ComputeHomogeneousTerm(), GetObstacleDistGain(), IK_Jacobian(), and SetObstacleDistGain(). |
|
|
Definition at line 72 of file IK_Jacobian.h. Referenced by GetObstacleTolerance(), IK_Jacobian(), and SetObstacleTolerance(). |
|
|
Definition at line 76 of file IK_Jacobian.h. Referenced by GetPathTolerence(), IK_Jacobian(), and SetPathTolerence(). |
|
|
Definition at line 81 of file IK_Jacobian.h. Referenced by ComputeHomogeneousTerm(). |
|
|
Definition at line 80 of file IK_Jacobian.h. Referenced by SetCollisionDetector(). |
|
|
Definition at line 78 of file IK_Jacobian.h. Referenced by CheckJointLimits(), CheckJointVelocities(), ComputeHomogeneousTerm(), IK_Jacobian(), and SetCollisionDetector(). |
|
|
Definition at line 69 of file IK_Jacobian.h. Referenced by ComputeHomogeneousTerm(), GetClosestValues(), GetNumObstaclePt(), IK_Jacobian(), and SetNumObstaclePt(). |
|
|
Definition at line 79 of file IK_Jacobian.h. Referenced by SetCollisionDetector(). |
|
|
Definition at line 82 of file IK_Jacobian.h. Referenced by SetCollisionDetector(). |
|
|
Definition at line 84 of file IK_Jacobian.h. Referenced by ComputeHomogeneousTerm(), GetClosestValues(), IK_Jacobian(), and ~IK_Jacobian(). |
|
|
Definition at line 85 of file IK_Jacobian.h. Referenced by SetTrajectory(). |
 1.4.6-NO
1.4.6-NO