#include <planners/prm/PL_PrmIjg.h>
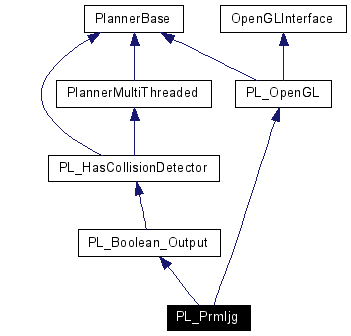
Inherits PL_Boolean_Output, and PL_OpenGL.
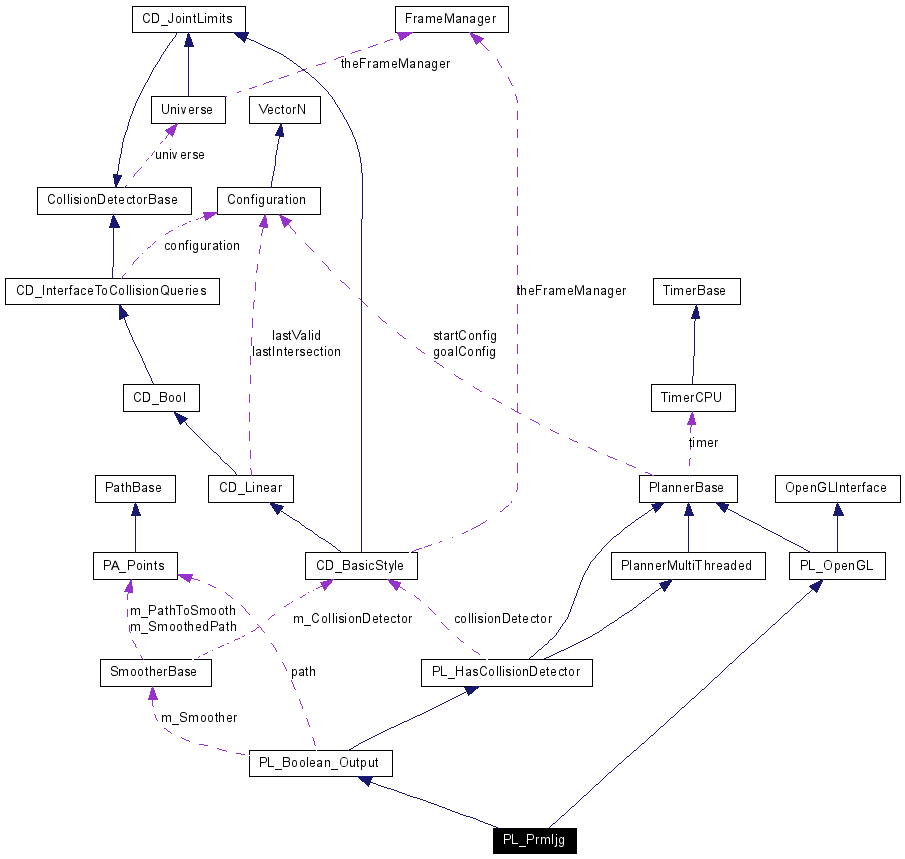
Inheritance diagram for PL_PrmIjg:
Public Member Functions | |
| PL_PrmIjg () | |
| virtual | ~PL_PrmIjg () |
| virtual bool | DrawExplicit () const |
| virtual void | DrawUniversePortion () const |
| bool | Plan () |
| void | PlanMultiThread (void *data) |
Protected Types | |
| typedef Graph::Graph< Configuration, bool > | PrmGraph |
Protected Member Functions | |
| bool | AddNodeToGraph (const int graphNum, const Configuration &config) |
| int | CreateNewGraph (const Configuration &config) |
| void | DrawOverlay (const Configuration &config) const |
| Configuration | GenerateRandomConfig () const |
| void | MergeGraphs (const int base, const int merge, const Configuration &config) |
| void | PrintGraph (const int graphNum) const |
Static Protected Member Functions | |
| static void | SetColor (const int i) |
Protected Attributes | |
| std::vector< PrmGraph > | m_Graphs |
| std::vector< bool > | m_GraphInFreeSpace |
| bool | m_PlanComplete |
| int | m_NumberOfTimesContinued |
Definition at line 14 of file PL_PrmIjg.h.
|
|
Definition at line 35 of file PL_PrmIjg.h. |
|
|
Definition at line 13 of file PL_PrmIjg.cpp. References m_Graphs. |
|
|
Definition at line 20 of file PL_PrmIjg.cpp. |
|
||||||||||||
|
Definition at line 29 of file PL_PrmIjg.cpp. References PL_HasCollisionDetector::collisionDetector, Graph::Graph< NodeData, EdgeData >::GetNodeData(), Graph::GraphBase::GetNumNodes(), CD_Bool::IsInterfering(), m_GraphInFreeSpace, and m_Graphs. Here is the call graph for this function:  |
|
|
Definition at line 147 of file PL_PrmIjg.cpp. References Graph::Graph< NodeData, EdgeData >::AddNode(), PL_HasCollisionDetector::collisionDetector, CD_Bool::IsInterfering(), m_GraphInFreeSpace, and m_Graphs. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_OpenGL. Definition at line 171 of file PL_PrmIjg.cpp. References Color::Colorf::GlDraw(), Color::green, Semaphore::Lock(), m_GraphInFreeSpace, m_Graphs, Color::opaque, and Color::red. Here is the call graph for this function: 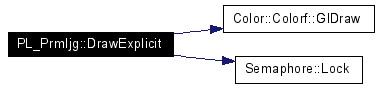 |
|
|
Definition at line 270 of file PL_PrmIjg.cpp. References Configuration::DOF(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_OpenGL. Definition at line 296 of file PL_PrmIjg.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), Color::Colorf::GlDraw(), Color::green, Semaphore::Lock(), m_GraphInFreeSpace, m_Graphs, Color::opaque, and Color::red. Here is the call graph for this function: 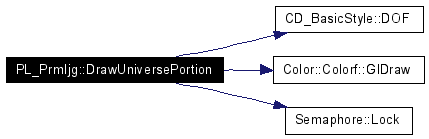 |
|
|
Definition at line 400 of file PL_PrmIjg.cpp. References PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and VectorN::SetLength(). Here is the call graph for this function: 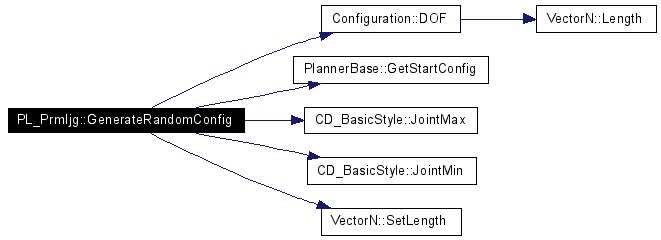 |
|
||||||||||||||||
|
Definition at line 422 of file PL_PrmIjg.cpp. References Graph::Graph< NodeData, EdgeData >::Add(), Graph::Graph< NodeData, EdgeData >::Clear(), Graph::Graph< NodeData, EdgeData >::GetNodeData(), Graph::GraphBase::GetNumNodes(), m_Graphs, and m_PlanComplete. Here is the call graph for this function: 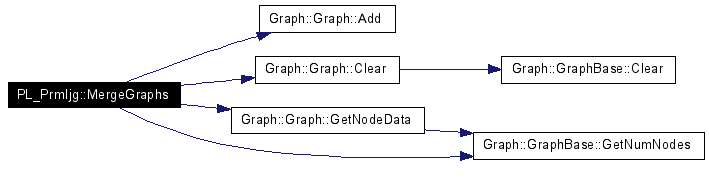 |
|
|
Implements PlannerBase. Definition at line 473 of file PL_PrmIjg.cpp. References CreateNewGraph(), PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), Semaphore::Lock(), and m_Graphs. Here is the call graph for this function: 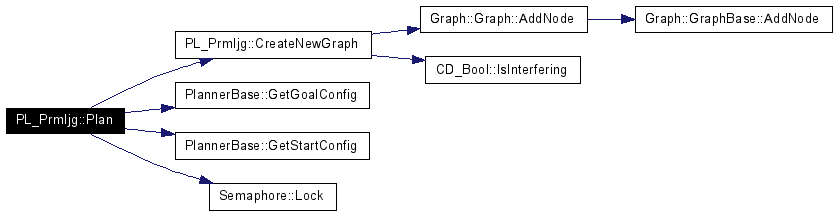 |
|
|
Definition at line 619 of file PL_PrmIjg.cpp. |
|
|
Definition at line 629 of file PL_PrmIjg.cpp. References Graph::Graph< NodeData, EdgeData >::GetNodeData(), Graph::GraphBase::GetNumNodes(), m_Graphs, and VectorN::Output(). Here is the call graph for this function: 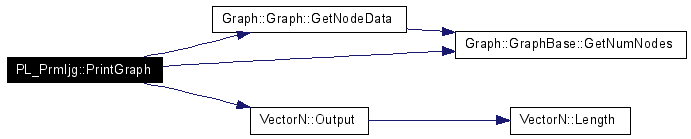 |
|
|
Definition at line 682 of file PL_PrmIjg.cpp. References Color::cyan_50, Color::green_50, Color::red_50, Color::white, and Color::yellow_50. |
|
|
Definition at line 37 of file PL_PrmIjg.h. Referenced by AddNodeToGraph(), CreateNewGraph(), DrawExplicit(), and DrawUniversePortion(). |
|
|
Definition at line 36 of file PL_PrmIjg.h. Referenced by AddNodeToGraph(), CreateNewGraph(), DrawExplicit(), DrawUniversePortion(), MergeGraphs(), PL_PrmIjg(), Plan(), and PrintGraph(). |
|
|
Definition at line 39 of file PL_PrmIjg.h. |
|
|
Definition at line 38 of file PL_PrmIjg.h. Referenced by MergeGraphs(). |
 1.4.6-NO
1.4.6-NO