#include <planners/PlannerBase.h>
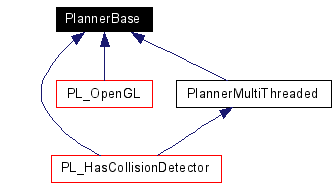
Inherited by PL_HasCollisionDetector [virtual], PL_OpenGL [virtual], and PlannerMultiThreaded [virtual].
Inheritance diagram for PlannerBase:
Public Member Functions | |
| PlannerBase () | |
| virtual | ~PlannerBase () |
| void | CopySettings (PlannerBase *original) |
| virtual void * | GetParameters () |
| virtual bool | SetParameters (const void *param) |
| virtual bool | ValidateParameters () |
| virtual bool | Plan ()=0 |
| virtual const PathBase * | GetPath () const =0 |
| virtual void | SetCollisionDetector (CollisionDetectorBase *collisionDetector) |
| bool | HasTimeLimitExpired () const |
| void | StartTimer () const |
| void | SetTimeLimitInSeconds (double newTimeLimit) |
| virtual bool | Save (const char *filename) const |
| virtual bool | Load (const char *filename) |
| bool | GetPlanSuccess () const |
| void | SetPlanSuccess (bool success) |
| double | GetTimeLimitInSeconds () const |
| double | GetTimeElapsedInSeconds () const |
| int | GetGuid () const |
| virtual void | SetStartConfig (const Configuration &configuration) |
| virtual void | SetGoalConfig (const Configuration &configuration) |
| const Configuration & | GetStartConfig () const |
| const Configuration & | GetGoalConfig () const |
Public Attributes | |
| bool | m_UseSemaphores |
Protected Attributes | |
| double | timeLimitInSeconds |
| bool | planSuccessful |
| int | guid |
| char * | paramBuffer |
| int | sizeOfParameterBuffer |
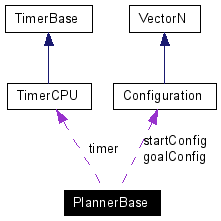
| TimerCPU | timer |
Private Attributes | |
| Configuration | startConfig |
| Configuration | goalConfig |
Definition at line 10 of file PlannerBase.h.
|
|
Definition at line 8 of file PlannerBase.cpp. |
|
|
Definition at line 19 of file PlannerBase.cpp. References paramBuffer. |
|
|
Reimplemented in PL_Astar, IK_ACA, IK_InvKinBase, PL_GraphBase, and PL_PRM. Definition at line 143 of file PlannerBase.cpp. |
|
|
|
Definition at line 148 of file PlannerBase.cpp. References guid. |
|
|
Reimplemented in PL_PRM. Definition at line 25 of file PlannerBase.cpp. References paramBuffer, and sizeOfParameterBuffer. Referenced by PL_PRM::GetParameters(), and ServerBase::GetPlannerParameters(). |
|
|
Implemented in PL_LinearCollision, and PL_Boolean_Output. Referenced by Server::SendPath(). |
|
|
Definition at line 112 of file PlannerBase.cpp. References planSuccessful. |
|
|
|
Definition at line 127 of file PlannerBase.cpp. References TimerCPU::ElapsedTime(), and timer. Referenced by PL_RRT_ClosedChain::OutputStatistics(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), and PL_MPEP::Planner_SMG_Greedy(). Here is the call graph for this function:  |
|
|
Definition at line 133 of file PlannerBase.cpp. References timeLimitInSeconds. Referenced by PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), and PL_PRM_ClosedChain::Plan(). |
|
|
|
Reimplemented in PL_Juan, IK_ACA, IK_InvKinBase, PL_GraphBase, and PL_Sandros. Definition at line 107 of file PlannerBase.cpp. Referenced by ServerBase::OpenExampleFile(). |
|
|
|
Reimplemented in PL_Juan, IK_ACA, IK_InvKinBase, PL_GraphBase, and PL_Sandros. Definition at line 102 of file PlannerBase.cpp. |
|
|
Reimplemented in IK_ACA. Definition at line 73 of file PlannerBase.cpp. |
|
|
Reimplemented in PL_Astar, RRT_TrajPlanner, PL_ATACE, IK_ACA, PL_GraphBase, PL_PRM, PL_Range_Sensor, and PL_Sandros. Definition at line 188 of file PlannerBase.cpp. References goalConfig. Referenced by IK_InvKinBase::AssignGoalConfig(), PL_ATACE::ExtendWithConstraint(), PL_ATACE::LazyTrackEEPath(), ServerBase::OpenExampleFile(), Server::Plan(), PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), ServerBase::RefreshPlanner(), PL_Range_Sensor::SetGoalConfig(), PL_GraphBase::SetGoalConfig(), IK_ACA::SetGoalConfig(), PL_ATACE::SetGoalConfig(), and RRT_TrajPlanner::SetGoalConfig(). |
|
|
Reimplemented in PL_PRM. Definition at line 33 of file PlannerBase.cpp. References paramBuffer, and sizeOfParameterBuffer. Referenced by PL_PRM::SetParameters(), and ServerBase::SetPlannerParameters(). |
|
|
Definition at line 117 of file PlannerBase.cpp. References planSuccessful. Referenced by DoPlanning(). |
|
|
|
Definition at line 96 of file PlannerBase.cpp. References timeLimitInSeconds. Referenced by PL_Range_Sensor::Plan(), PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), and PL_PRM_ClosedChain::Plan(). |
|
|
Definition at line 91 of file PlannerBase.cpp. References TimerCPU::Start(), and timer. Referenced by PL_Sandros::Plan(), PL_RRT_CONNECT::Plan(), PL_RRT::Plan(), PL_Range_Sensor::Plan(), PL_PRM::Plan(), PL_SimplexSubdivision::Plan(), IK_Jacobian::Plan(), IK_ACA::Plan(), PL_PRM_ClosedLocalJacobian::Plan(), PL_RRT_ClosedChain::Plan(), PL_RGD_RRT::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), PL_ATACE::Plan(), PL_Astar::Plan(), PL_Juan::Plan(), and PL_ACA_CONNECT::Plan(). Here is the call graph for this function:  |
|
|
Reimplemented in PL_PRM. Definition at line 68 of file PlannerBase.cpp. |
|
|
Definition at line 49 of file PlannerBase.h. Referenced by GetGoalConfig(), PL_MPEP::Plan(), and SetGoalConfig(). |
|
|
|
Definition at line 38 of file PlannerBase.h. Referenced by PlannerMultiThreaded::PlanMultiThreaded(). |
|
|
Definition at line 43 of file PlannerBase.h. Referenced by PL_PRM::GetParameters(), GetParameters(), PL_PRM::SetParameters(), SetParameters(), and ~PlannerBase(). |
|
|
Definition at line 41 of file PlannerBase.h. Referenced by GetPlanSuccess(), and SetPlanSuccess(). |
|
|
Definition at line 44 of file PlannerBase.h. Referenced by PL_PRM::GetParameters(), GetParameters(), and SetParameters(). |
|
|
Definition at line 48 of file PlannerBase.h. Referenced by GetStartConfig(), PL_MPEP::Plan(), PL_ForTest::Plan(), and SetStartConfig(). |
|
|
Definition at line 40 of file PlannerBase.h. Referenced by GetTimeLimitInSeconds(), and SetTimeLimitInSeconds(). |
|
|
Definition at line 45 of file PlannerBase.h. Referenced by GetTimeElapsedInSeconds(), HasTimeLimitExpired(), and StartTimer(). |
 1.4.6-NO
1.4.6-NO
