#include <planners/PL_Boolean_Output.h>
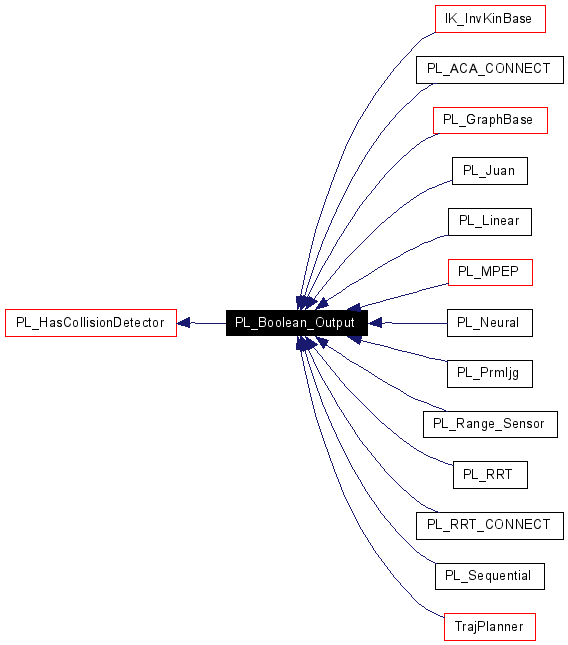
Inherits PL_HasCollisionDetector.
Inherited by IK_InvKinBase [virtual], PL_ACA_CONNECT, PL_GraphBase [virtual], PL_Juan, PL_Linear, PL_MPEP, PL_Neural, PL_PrmIjg, PL_Range_Sensor, PL_RRT, PL_RRT_CONNECT, PL_Sequential, and TrajPlanner.
Inheritance diagram for PL_Boolean_Output:
Public Member Functions | |
| PL_Boolean_Output () | |
| virtual | ~PL_Boolean_Output () |
| virtual const PathBase * | GetPath () const |
| virtual const PA_Points * | GetPathPA_Points () const |
| void | SetSmoother (SmootherBase *smoother) |
| void | SetPath (PA_Points *pa_points_path) |
Protected Attributes | |
| PA_Points | path |
| SmootherBase * | m_Smoother |
Definition at line 9 of file PL_Boolean_Output.h.
|
|
Definition at line 4 of file PL_Boolean_Output.cpp. |
|
|
Definition at line 10 of file PL_Boolean_Output.cpp. |
|
|
Implements PlannerBase. Definition at line 13 of file PL_Boolean_Output.cpp. References path. Referenced by PL_ATACE::ExtendWithConstraint(), PL_ForTest::FindLocalPath2(), PL_ATACE::LazyTrackEEPath(), PL_Range_Sensor::Plan(), PL_PRM_ClosedLocalJacobian::Plan(), PL_RGD_PRM::Plan(), PL_PRM_ClosedChain::Plan(), Jacobian_TrajPlanner::Plan(), and RRT_TrajPlanner::Plan(). |
|
|
Definition at line 18 of file PL_Boolean_Output.cpp. References path. |
|
|
Definition at line 28 of file PL_Boolean_Output.cpp. References path. |
|
|
Definition at line 23 of file PL_Boolean_Output.cpp. References m_Smoother. Referenced by ServerBase::RefreshSmoother(). |
|
|
Definition at line 23 of file PL_Boolean_Output.h. Referenced by PL_PRM::Plan(), and SetSmoother(). |
|
 1.4.6-NO
1.4.6-NO