#include <planners/atace/PL_ATACE.h>
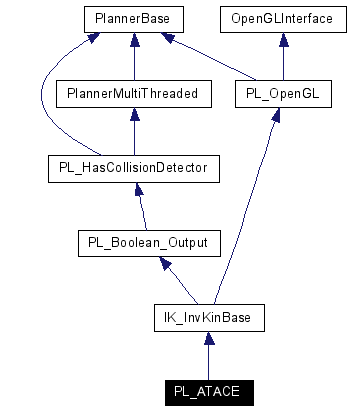
Inherits IK_InvKinBase.
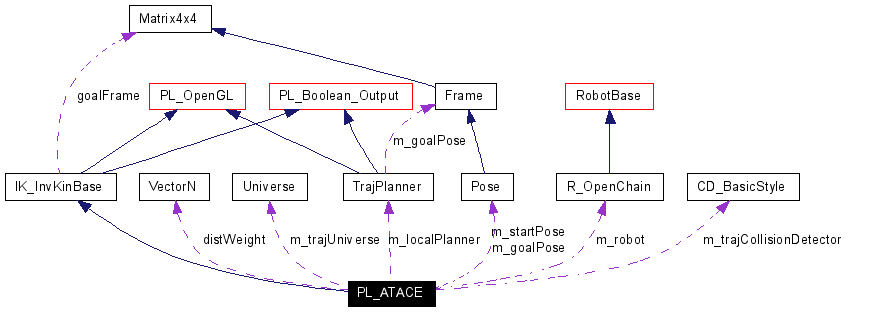
Inheritance diagram for PL_ATACE:
Definition at line 90 of file PL_ATACE.h.
|
|
|
Definition at line 95 of file PL_ATACE.cpp. References ClearTree(), DeleteTrajectoryCD(), m_localPlanner, and m_rootVert. Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Definition at line 669 of file PL_ATACE.cpp. References VertexInfo::collisionChecked, Node::conf, VertexInfo::conf, CopyEEPath(), CopyPath(), VertexInfo::dirPose, VertexInfo::edge, VertexInfo::eeEdge, VertexInfo::flag, FLAG_NEW, PlannerBase::guid, Semaphore::Lock(), m_trajTree, m_useLazy, m_vertices, Node::pose, VertexInfo::pose, and Semaphore::Unlock(). Referenced by Plan(). Here is the call graph for this function: 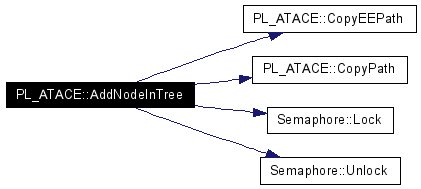 |
|
||||||||||||
|
Definition at line 1114 of file PL_ATACE.cpp. References PA_Points::AppendPoint(), PA_Points::GetPoint(), and PA_Points::Size(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1106 of file PL_ATACE.cpp. References PA_Points::AppendPoint(), and PA_Points::Size(). Referenced by ExtendWithConstraint(). Here is the call graph for this function:  |
|
|
Definition at line 555 of file PL_ATACE.cpp. References FLAG_OBSOLETE, PlannerBase::guid, Semaphore::Lock(), m_trajTree, and m_vertices. Referenced by CreateTree(), and ~PL_ATACE(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1127 of file PL_ATACE.cpp. Referenced by AddNodeInTree(). |
|
||||||||||||
|
Definition at line 1122 of file PL_ATACE.cpp. Referenced by AddNodeInTree(). |
|
|
Definition at line 939 of file PL_ATACE.cpp. References Universe::AddEntity(), PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::GetAllElements(), and m_trajUniverse. Referenced by SetCollisionDetector(). Here is the call graph for this function: 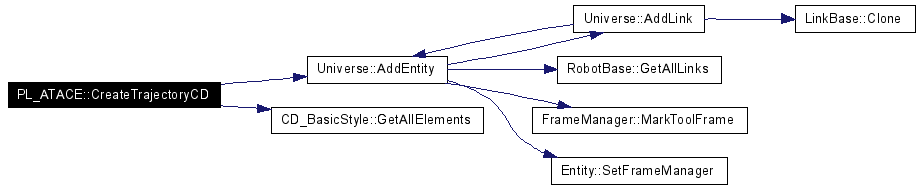 |
|
|
Definition at line 533 of file PL_ATACE.cpp. References ClearTree(), Node::conf, VertexInfo::conf, VertexInfo::flag, FLAG_NEW, PlannerBase::guid, Semaphore::Lock(), m_rootVert, m_trajTree, m_vertices, Node::pose, VertexInfo::pose, and Semaphore::Unlock(). Referenced by Plan(). Here is the call graph for this function: 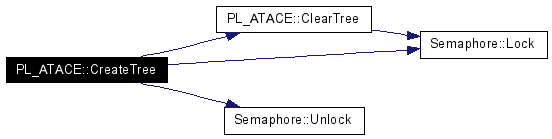 |
|
|
Definition at line 992 of file PL_ATACE.cpp. References m_trajCollisionDetector, and m_trajUniverse. Referenced by SetCollisionDetector(), and ~PL_ATACE(). |
|
||||||||||||
|
Definition at line 518 of file PL_ATACE.cpp. References PL_HasCollisionDetector::collisionDetector, CD_JointLimits::JointDisplacement(), and VectorN::Length(). Here is the call graph for this function: 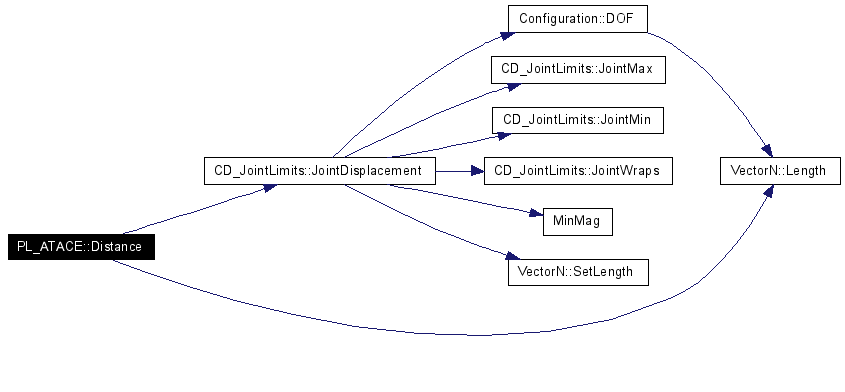 |
|
||||||||||||
|
Definition at line 510 of file PL_ATACE.cpp. References Frame::GetTranslationVector(). Referenced by ExtendWithConstraint(), FindClosestInTree(), InterpolatePath(), and IsInterfering(). Here is the call graph for this function:  |
|
|
Reimplemented from IK_InvKinBase. Definition at line 1367 of file PL_ATACE.cpp. References VertexInfo::conf, VertexInfo::flag, FLAG_OBSOLETE, Frame::GetTranslationVector(), PlannerBase::guid, Semaphore::Lock(), m_drawCSpace, m_trajTree, m_vertices, and VertexInfo::pose. Here is the call graph for this function: 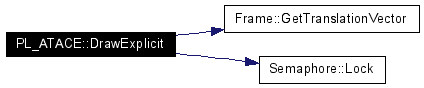 |
|
||||||||||||||||
|
Definition at line 454 of file PL_ATACE.cpp. References PA_Points::Clear(), PL_HasCollisionDetector::collisionDetector, Node::conf, ERR_FAIL, ERR_SUCCESS, ExtendWithConstraint(), GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), GetPoseFromTree(), InterpolatePath(), CD_Linear::IsInterferingLinear(), m_stepSize, m_useGoalConf, m_useLazy, and Node::pose. Referenced by Plan(). Here is the call graph for this function: 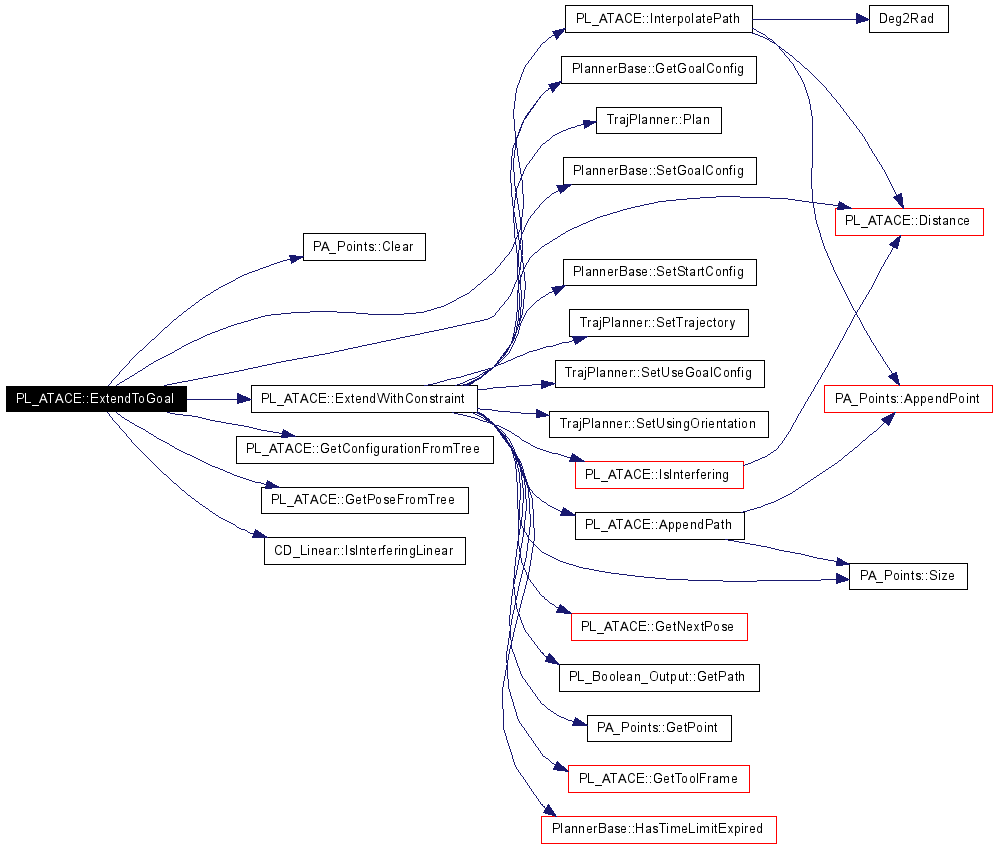 |
|
||||||||||||||||||||||||||||
|
Definition at line 212 of file PL_ATACE.cpp. References AppendPath(), Node::conf, Distance(), PlannerBase::GetGoalConfig(), GetNextPose(), PL_Boolean_Output::GetPath(), PA_Points::GetPoint(), GetToolFrame(), PlannerBase::HasTimeLimitExpired(), IsInterfering(), LogMatrix, LogMessage, m_localPlanner, m_stepSize, m_timeInterval, m_useGoalConf, m_useLazy, m_useOrientation, m_useOrientationAlways, TrajPlanner::Plan(), Node::pose, PlannerBase::SetGoalConfig(), PlannerBase::SetStartConfig(), TrajPlanner::SetTrajectory(), TrajPlanner::SetUseGoalConfig(), TrajPlanner::SetUsingOrientation(), and PA_Points::Size(). Referenced by ExtendToGoal(), and Plan(). Here is the call graph for this function: 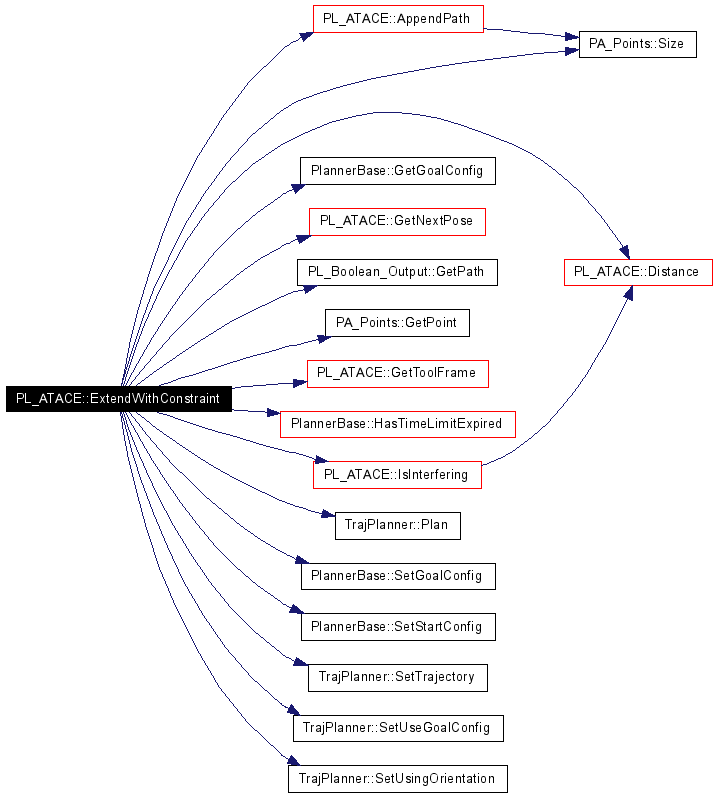 |
|
|
Definition at line 755 of file PL_ATACE.cpp. References Node::conf, FindClosestInTree(), FLAG_C_METRICS, FLAG_P_METRICS, m_metrics, and Node::pose. Here is the call graph for this function:  |
|
|
Definition at line 726 of file PL_ATACE.cpp. References VertexInfo::conf, Distance(), VertexInfo::flag, FLAG_OBSOLETE, m_trajTree, and m_vertices. Here is the call graph for this function:  |
|
|
Definition at line 697 of file PL_ATACE.cpp. References Distance(), VertexInfo::flag, FLAG_OBSOLETE, m_trajTree, m_vertices, and VertexInfo::pose. Referenced by FindClosestInTree(), and Plan(). Here is the call graph for this function:  |
|
|
Definition at line 1063 of file PL_ATACE.cpp. References Configuration::DOF(), and VectorN::SetLength(). Referenced by GenerateRandomNode(). Here is the call graph for this function:  |
|
|
Definition at line 1057 of file PL_ATACE.cpp. References Node::conf, GenerateRandomConfig(), GetToolFrame(), and Node::pose. Referenced by Plan(). Here is the call graph for this function: 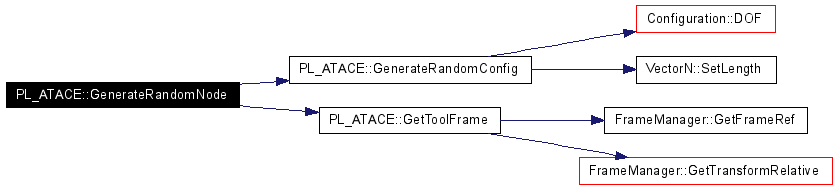 |
|
|
Definition at line 770 of file PL_ATACE.cpp. References VertexInfo::conf, and m_trajTree. Referenced by ExtendToGoal(), LazyTrackEEPath(), and Plan(). |
|
|
Definition at line 125 of file PL_ATACE.h. References m_drawCSpace. |
|
|
Definition at line 133 of file PL_ATACE.h. References m_useLazy. |
|
|
Definition at line 137 of file PL_ATACE.h. References m_nLocalPlanner. |
|
|
Definition at line 121 of file PL_ATACE.h. References m_metrics. |
|
||||||||||||||||||||
|
Definition at line 820 of file PL_ATACE.cpp. References AdjustPoseToSatisfy, GetDirectedVelocity, Frame::GetTranslationVector(), IsPoseSatified, IsZero, m_timeInterval, m_useOrientation, m_useOrientationAlways, Vector4::Magnitude(), Rad2Deg(), Matrix4x4::Rotate2(), Pose::SetTranslationVector(), and Matrix4x4::Translate(). Referenced by ExtendWithConstraint(). Here is the call graph for this function: 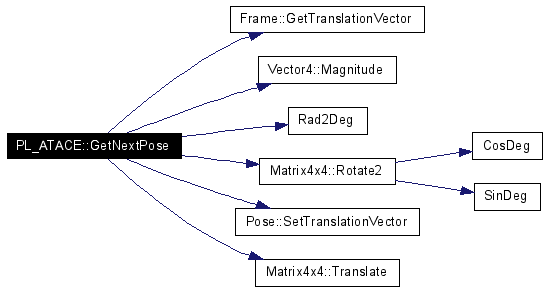 |
|
|
Definition at line 129 of file PL_ATACE.h. References m_useOrientation. |
|
|
Definition at line 784 of file PL_ATACE.cpp. References VertexInfo::edge, and m_trajTree. Referenced by RetrievePath(). |
|
|
Definition at line 777 of file PL_ATACE.cpp. References m_trajTree, and VertexInfo::pose. Referenced by ExtendToGoal(), and Plan(). |
|
|
Definition at line 117 of file PL_ATACE.h. References m_stepSize. |
|
|
Definition at line 113 of file PL_ATACE.h. References m_timeInterval. |
|
|
Reimplemented from IK_InvKinBase. Definition at line 1038 of file PL_ATACE.cpp. References FrameManager::GetFrameRef(), FrameManager::GetTransformRelative(), and m_toolFrame. Referenced by ExtendWithConstraint(), GenerateRandomNode(), and SetGoalConfig(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1140 of file PL_ATACE.cpp. References PA_Points::Size(). Referenced by RetrievePath(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 1178 of file PL_ATACE.cpp. References PA_Points::AppendPoint(), Deg2Rad(), Distance(), and m_timeInterval. Referenced by ExtendToGoal(), and LazyTrackEEPath(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 1016 of file PL_ATACE.cpp. References Distance(), Frame::GetTranslationVector(), LEN_RESOLUTION, and m_trajCollisionDetector. Referenced by ExtendWithConstraint(), and Plan(). Here is the call graph for this function:  |
|
|
Definition at line 1330 of file PL_ATACE.cpp. References AdjustPoseToSatisfy, GetDirectedVelocity, GetVelocity, IsPoseSatified, m_isGoalConfSet, m_isGoalPoseSet, m_isStartConfSet, m_isStartPoseSet, m_localPlanner, m_useGoalConf, m_useGoalPose, m_useStartConf, and m_useStartPose. |
|
|
Definition at line 334 of file PL_ATACE.cpp. References VertexInfo::collisionChecked, PL_HasCollisionDetector::collisionDetector, VertexInfo::conf, VertexInfo::eeEdge, GetConfigurationFromTree(), PlannerBase::GetGoalConfig(), PL_Boolean_Output::GetPath(), InterpolatePath(), CD_Linear::IsInterferingLinear(), m_goalVert, m_localPlanner, m_trajTree, m_useGoalConf, m_useOrientation, m_useOrientationAlways, TrajPlanner::Plan(), PlannerBase::SetGoalConfig(), PlannerBase::SetStartConfig(), TrajPlanner::SetTrajectory(), TrajPlanner::SetUseGoalConfig(), and TrajPlanner::SetUsingOrientation(). Here is the call graph for this function: 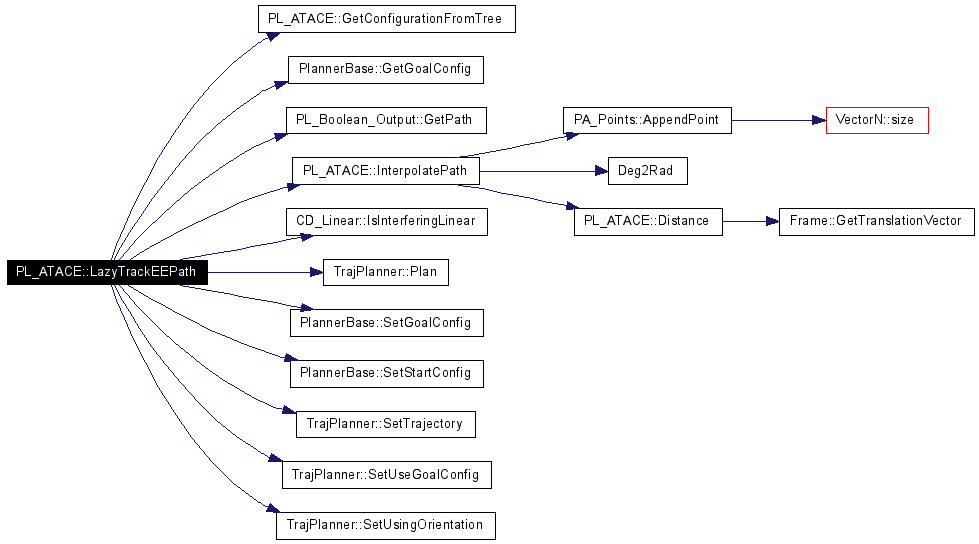 |
|
|
Reimplemented from IK_InvKinBase. Definition at line 110 of file PL_ATACE.cpp. References AddNodeInTree(), PA_Points::Clear(), Node::conf, CreateTree(), ERR_FAIL, ERR_SUCCESS, ERR_TIMEOUT, ExtendToGoal(), ExtendWithConstraint(), FindClosestInTree(), GenerateRandomNode(), GetConfigurationFromTree(), GetPoseFromTree(), PlannerBase::GetStartConfig(), PlannerBase::HasTimeLimitExpired(), IsInterfering(), m_goalPose, m_goalVert, m_rootVert, m_startPose, PL_Boolean_Output::path, Node::pose, RetrievePath(), and PlannerBase::StartTimer(). Here is the call graph for this function: 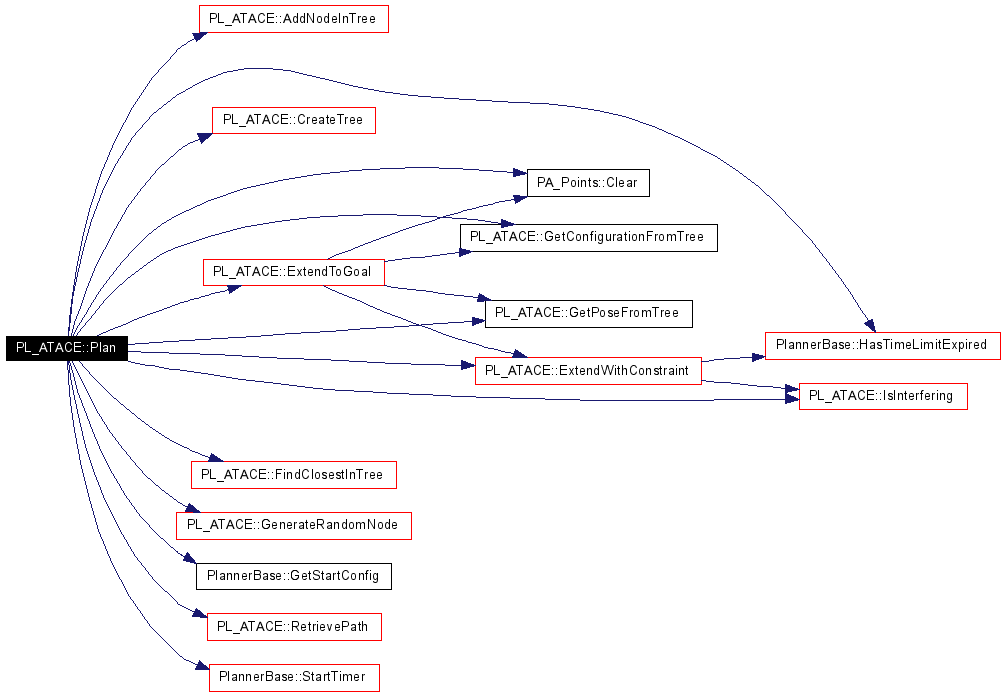 |
|
|
Definition at line 1096 of file PL_ATACE.cpp. References GetPathFromTree(), InsertPath(), m_trajTree, and PL_Boolean_Output::path. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_HasCollisionDetector. Definition at line 1194 of file PL_ATACE.cpp. References PL_HasCollisionDetector::collisionDetector, CreateTrajectoryCD(), DeleteTrajectoryCD(), R_OpenChain::DOF(), R_OpenChain::GetLink(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), m_localPlanner, m_robot, m_stepSize, m_toolFrame, Vector4::Magnitude(), and PL_HasCollisionDetector::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 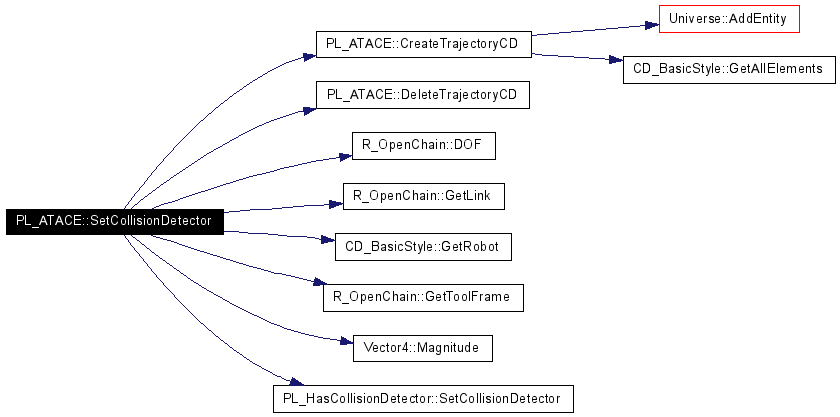 |
|
|
Definition at line 911 of file PL_ATACE.cpp. References GetDirectedVelocity. |
|
|
Definition at line 124 of file PL_ATACE.h. References m_drawCSpace. |
|
|
Reimplemented from PlannerBase. Definition at line 1257 of file PL_ATACE.cpp. References GetToolFrame(), m_goalPose, m_isGoalConfSet, and PlannerBase::SetGoalConfig(). Here is the call graph for this function:  |
|
|
Definition at line 1273 of file PL_ATACE.cpp. References m_goalPose, and m_isGoalPoseSet. |
|
|
Definition at line 132 of file PL_ATACE.h. References m_useLazy. |
|
|
Definition at line 1231 of file PL_ATACE.cpp. References LOCAL_RRT, m_localPlanner, and m_nLocalPlanner. |
|
|
Definition at line 120 of file PL_ATACE.h. References m_metrics. |
|
||||||||||||
|
Definition at line 128 of file PL_ATACE.h. References m_useOrientation, and m_useOrientationAlways. |
|
|
Definition at line 901 of file PL_ATACE.cpp. References AdjustPoseToSatisfy. |
|
|
Definition at line 896 of file PL_ATACE.cpp. References IsPoseSatified. |
|
|
Definition at line 1302 of file PL_ATACE.cpp. References m_useGoalConf, m_useGoalPose, m_useStartConf, m_useStartPose, TYPE_GOAL_CONF, TYPE_GOAL_POSE, TYPE_START_CONF, and TYPE_START_POSE. |
|
|
Reimplemented from PlannerBase. Definition at line 1248 of file PL_ATACE.cpp. References m_isStartConfSet, and PlannerBase::SetStartConfig(). Here is the call graph for this function:  |
|
|
Definition at line 1267 of file PL_ATACE.cpp. References m_isStartPoseSet, and m_startPose. |
|
|
Definition at line 116 of file PL_ATACE.h. References m_stepSize. |
|
|
Definition at line 112 of file PL_ATACE.h. References m_timeInterval. |
|
|
Definition at line 906 of file PL_ATACE.cpp. References GetVelocity. |
|
|
Definition at line 608 of file PL_ATACE.cpp. References PlannerBase::guid, Semaphore::Lock(), m_goalVert, m_trajTree, and m_vertices. Here is the call graph for this function:  |
|
|
Definition at line 212 of file PL_ATACE.h. Referenced by GetNextPose(), IsReady(), PL_ATACE(), and SetPoseAdjuster(). |
|
|
Definition at line 180 of file PL_ATACE.h. |
|
|
Definition at line 214 of file PL_ATACE.h. Referenced by GetNextPose(), IsReady(), PL_ATACE(), and SetDirectedVelocityChecker(). |
|
|
Definition at line 213 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetVelocityChecker(). |
|
|
Definition at line 211 of file PL_ATACE.h. Referenced by GetNextPose(), IsReady(), PL_ATACE(), and SetPoseChecker(). |
|
|
Definition at line 146 of file PL_ATACE.h. Referenced by DrawExplicit(), GetDrawSpace(), PL_ATACE(), and SetDrawSpace(). |
|
|
Definition at line 153 of file PL_ATACE.h. Referenced by Plan(), SetGoalConfig(), and SetGoalPose(). |
|
|
Definition at line 164 of file PL_ATACE.h. Referenced by LazyTrackEEPath(), Plan(), and TrimTreeFrom(). |
|
|
Definition at line 159 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetGoalConfig(). |
|
|
Definition at line 158 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetGoalPose(). |
|
|
Definition at line 161 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetStartConfig(). |
|
|
Definition at line 160 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetStartPose(). |
|
|
Definition at line 142 of file PL_ATACE.h. Referenced by ExtendWithConstraint(), IsReady(), LazyTrackEEPath(), PL_ATACE(), SetCollisionDetector(), SetLocalPlanner(), and ~PL_ATACE(). |
|
|
Definition at line 144 of file PL_ATACE.h. Referenced by FindClosestInTree(), GetMetrics(), PL_ATACE(), and SetMetrics(). |
|
|
Definition at line 143 of file PL_ATACE.h. Referenced by GetLocalPlanner(), PL_ATACE(), and SetLocalPlanner(). |
|
|
Definition at line 140 of file PL_ATACE.h. Referenced by PL_ATACE(), and SetCollisionDetector(). |
|
|
Definition at line 185 of file PL_ATACE.h. Referenced by CreateTree(), PL_ATACE(), Plan(), and ~PL_ATACE(). |
|
|
Definition at line 152 of file PL_ATACE.h. Referenced by Plan(), and SetStartPose(). |
|
|
Definition at line 149 of file PL_ATACE.h. Referenced by ExtendToGoal(), ExtendWithConstraint(), GetStepSize(), PL_ATACE(), SetCollisionDetector(), and SetStepSize(). |
|
|
Definition at line 150 of file PL_ATACE.h. Referenced by ExtendWithConstraint(), GetNextPose(), GetTimeInterval(), InterpolatePath(), PL_ATACE(), and SetTimeInterval(). |
|
|
Definition at line 141 of file PL_ATACE.h. Referenced by GetToolFrame(), PL_ATACE(), and SetCollisionDetector(). |
|
|
Definition at line 174 of file PL_ATACE.h. Referenced by DeleteTrajectoryCD(), IsInterfering(), and PL_ATACE(). |
|
|
Definition at line 186 of file PL_ATACE.h. Referenced by AddNodeInTree(), ClearTree(), CreateTree(), DrawExplicit(), FindClosestInTree(), GetConfigurationFromTree(), GetPathFromTree(), GetPoseFromTree(), LazyTrackEEPath(), RetrievePath(), and TrimTreeFrom(). |
|
|
Definition at line 173 of file PL_ATACE.h. Referenced by CreateTrajectoryCD(), DeleteTrajectoryCD(), and PL_ATACE(). |
|
|
Definition at line 155 of file PL_ATACE.h. Referenced by ExtendToGoal(), ExtendWithConstraint(), IsReady(), LazyTrackEEPath(), PL_ATACE(), and SetProblemType(). |
|
|
Definition at line 154 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetProblemType(). |
|
|
Definition at line 145 of file PL_ATACE.h. Referenced by AddNodeInTree(), ExtendToGoal(), ExtendWithConstraint(), GetLazy(), PL_ATACE(), and SetLazy(). |
|
|
Definition at line 147 of file PL_ATACE.h. Referenced by ExtendWithConstraint(), GetNextPose(), GetOrientation(), LazyTrackEEPath(), PL_ATACE(), and SetOrientation(). |
|
|
Definition at line 148 of file PL_ATACE.h. Referenced by ExtendWithConstraint(), GetNextPose(), LazyTrackEEPath(), PL_ATACE(), and SetOrientation(). |
|
|
Definition at line 157 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetProblemType(). |
|
|
Definition at line 156 of file PL_ATACE.h. Referenced by IsReady(), PL_ATACE(), and SetProblemType(). |
|
|
Definition at line 187 of file PL_ATACE.h. Referenced by AddNodeInTree(), ClearTree(), CreateTree(), DrawExplicit(), FindClosestInTree(), and TrimTreeFrom(). |
 1.4.6-NO
1.4.6-NO