#include <planners/sandros/PL_Sandros.h>
Inherits PL_GraphBase.
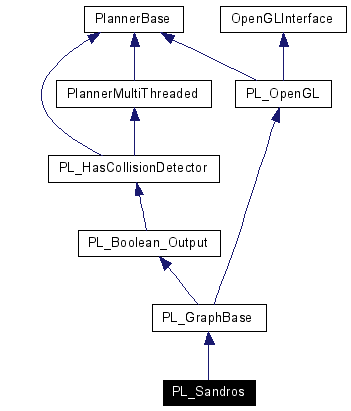
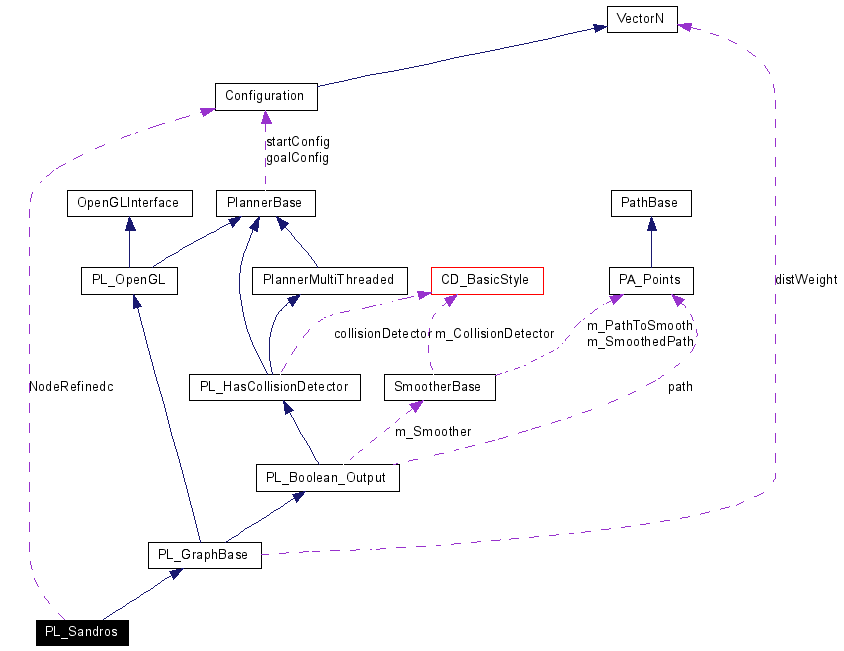
Inheritance diagram for PL_Sandros:
Public Member Functions | |
| PL_Sandros () | |
| virtual | ~PL_Sandros () |
| virtual bool | Plan () |
| virtual bool | Save (const char *filename) const |
| virtual bool | Load (const char *filename) |
| virtual bool | DrawExplicit () const |
| virtual void | SetStartConfig (const Configuration &config) |
| virtual void | SetGoalConfig (const Configuration &config) |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
| virtual void | ClearGraph () |
| int | GetRefinedNode (int i) |
| void | SetValue (int m_Grid, int m_Neighbor, int m_Tolerance) |
Protected Member Functions | |
| void | ConstructGraph () |
| bool | SearchForSequence (node_list &L) |
| double | DistanceSandros (const node &n1, const node &n2) |
| void | InitailizeGraph () |
| void | DealwithSequence (const node_list &L) |
| edge | FindEdgeBetweenTwoNodes (const node &n1, const node &n2) |
| void | SaveSandrosPath (const node_list &L) |
| node | GenerateNewNode (int res, const node n1) |
| bool | IsInterferingSan (const Configuration &n1, const node &n2, Configuration &p) |
| bool | IsNeighber (const node &n3, const node &n2) |
| node | GenerateNewNodeGrid (int res, const node n1, int no) |
| node | FindNextNodeToRefined () |
| bool | IsNeighberSan (const Configuration &c1, const node &n2) |
Protected Attributes | |
| SuccessResultType | plan_success |
| BOOL | m_bNoOtherSequence |
| BOOL | m_bResolutionLimit |
| node_pq< int > * | m_quenQ |
| node_map< node > | m_nodePs |
| queue< node > * | m_quenQ1 |
| node_map< node > | m_nodePt |
| node_map< int > | m_refine_level |
| node_map< bool > | m_nodeInPsIsland |
| node_map< Configuration > | m_nodeInUPs |
| node_map< NodeInUVorPsPt > | m_nodeUVPsPt |
| edge_map< bool > | m_bEdgeHiden |
| edge_array< double > | m_c |
| int | Tolerance |
| int | seedofa |
| int | dof |
| int | current_res |
| double | ThreshHold |
| double | stride |
| int | nextNo |
| Configuration | NodeRefinedc |
| node | NodeRefined |
Definition at line 39 of file PL_Sandros.h.
|
|
Definition at line 393 of file PL_Sandros.cpp. References ClearGraph(), current_res, FAIL, m_bResolutionLimit, nextNo, NodeRefined, plan_success, seedofa, stride, ThreshHold, and Tolerance. Here is the call graph for this function:  |
|
|
Definition at line 50 of file PL_Sandros.cpp. |
|
|
Reimplemented from PL_GraphBase. Definition at line 561 of file PL_Sandros.cpp. References PL_GraphBase::ClearGraph(). Referenced by PL_Sandros(), and SetStartConfig(). Here is the call graph for this function:  |
|
|
Definition at line 636 of file PL_Sandros.cpp. References current_res, dof, FindNextNodeToRefined(), for_allnodes_inPs, PL_GraphBase::G, m_bEdgeHiden, m_bResolutionLimit, m_nodeInPsIsland, m_nodeInUPs, m_nodePs, m_nodeUVPsPt, m_quenQ, m_refine_level, NodeInPs, NodeRefined, NodeRefinedc, stride, ThreshHold, and Tolerance. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Definition at line 503 of file PL_Sandros.cpp. References FindEdgeBetweenTwoNodes(), PL_GraphBase::G, PL_GraphBase::goalNode, PL_GraphBase::IsInterfering(), IsInterferingSan(), m_bEdgeHiden, m_nodeInUPs, m_nodePs, m_nodeUVPsPt, m_quenQ, m_refine_level, NodeInPs, PASS, and plan_success. Referenced by Plan(). Here is the call graph for this function: 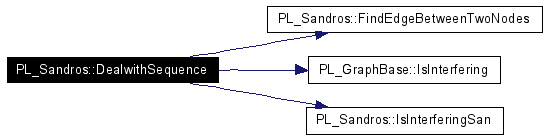 |
|
||||||||||||
|
Definition at line 908 of file PL_Sandros.cpp. References dof, and PL_GraphBase::G. |
|
|
Reimplemented from PL_GraphBase. Definition at line 567 of file PL_Sandros.cpp. References Semaphore::Lock(), and Semaphore::Unlock(). Here is the call graph for this function: 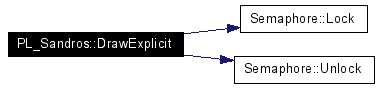 |
|
||||||||||||
|
Definition at line 491 of file PL_Sandros.cpp. References PL_GraphBase::G. Referenced by DealwithSequence(). |
|
|
Definition at line 601 of file PL_Sandros.cpp. References m_quenQ. Referenced by ConstructGraph(). |
|
||||||||||||
|
Definition at line 254 of file PL_Sandros.cpp. References PL_HasCollisionDetector::collisionDetector, dof, PL_GraphBase::G, CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and VectorN::SetLength(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 210 of file PL_Sandros.cpp. References CD_BasicStyle::ActivateFrames(), PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DeactivateFrames(), dof, PL_GraphBase::G, PL_GraphBase::IsInterfering(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), nextNo, seedofa, VectorN::SetLength(), and stride. Here is the call graph for this function:  |
|
|
Definition at line 55 of file PL_Sandros.cpp. References dof, NodeRefined, and NodeRefinedc. |
|
|
Definition at line 287 of file PL_Sandros.cpp. References dof, and VectorN::SetLength(). Referenced by Plan(). Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 894 of file PL_Sandros.cpp. References dof, and PL_GraphBase::G. Referenced by DealwithSequence(). |
|
||||||||||||
|
Definition at line 842 of file PL_Sandros.cpp. References dof, and PL_GraphBase::G. |
|
||||||||||||
|
Definition at line 868 of file PL_Sandros.cpp. References dof, and PL_GraphBase::G. |
|
|
Reimplemented from PL_GraphBase. Definition at line 359 of file PL_Sandros.cpp. References Semaphore::Lock(), and Semaphore::Unlock(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 74 of file PL_Sandros.cpp. References PL_HasCollisionDetector::collisionDetector, ConstructGraph(), DealwithSequence(), CD_BasicStyle::DOF(), dof, FAIL, PL_GraphBase::goalNode, PL_GraphBase::graphPath, PlannerBase::guid, InitailizeGraph(), Semaphore::Lock(), m_bNoOtherSequence, m_bResolutionLimit, PASS, plan_success, SaveSandrosPath(), SearchForSequence(), PL_GraphBase::startNode, PlannerBase::StartTimer(), PL_GraphBase::TranslatePath(), and Semaphore::Unlock(). Here is the call graph for this function: 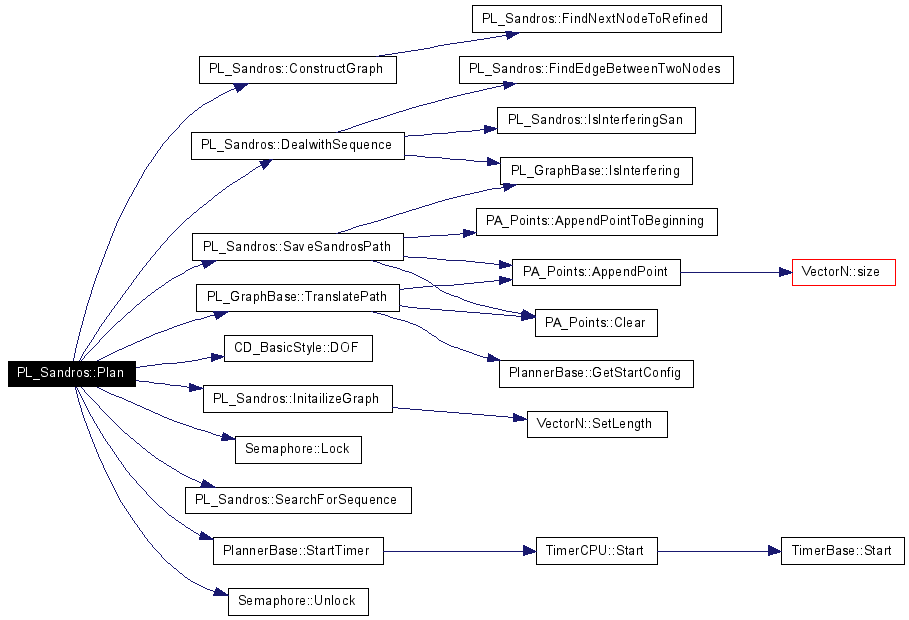 |
|
|
Reimplemented from PL_GraphBase. Definition at line 336 of file PL_Sandros.cpp. |
|
|
Definition at line 172 of file PL_Sandros.cpp. References PA_Points::AppendPoint(), PA_Points::AppendPointToBeginning(), PA_Points::Clear(), PL_GraphBase::G, PL_GraphBase::goalNode, PL_GraphBase::IsInterfering(), m_nodeInUPs, m_nodePs, m_nodeUVPsPt, NodeInPt, PL_Boolean_Output::path, and PL_GraphBase::startNode. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Definition at line 933 of file PL_Sandros.cpp. References dof, for_allnodes_inPsNoIsland, PL_GraphBase::G, PL_GraphBase::goalNode, m_c, m_nodeUVPsPt, and NodeInPs. Referenced by Plan(). |
|
|
Reimplemented from PL_GraphBase. Definition at line 486 of file PL_Sandros.cpp. References PL_HasCollisionDetector::collisionDetector, and PL_GraphBase::SetCollisionDetector(). Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 458 of file PL_Sandros.cpp. References FAIL, PL_GraphBase::G, PlannerBase::GetGoalConfig(), PL_GraphBase::goalNode, PL_GraphBase::IsInterfering(), plan_success, and PL_GraphBase::SetGoalConfig(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 409 of file PL_Sandros.cpp. References ClearGraph(), FAIL, PL_GraphBase::G, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), PL_GraphBase::goalNode, PL_GraphBase::IsInterfering(), plan_success, PL_GraphBase::SetGoalConfig(), PL_GraphBase::SetStartConfig(), and PL_GraphBase::startNode. Here is the call graph for this function:  |
|
||||||||||||||||
|
Definition at line 281 of file PL_Sandros.cpp. References stride, ThreshHold, and Tolerance. |
|
|
Definition at line 101 of file PL_Sandros.h. Referenced by ConstructGraph(), and PL_Sandros(). |
|
|
Definition at line 100 of file PL_Sandros.h. Referenced by ConstructGraph(), DistanceSandros(), GenerateNewNode(), GenerateNewNodeGrid(), GetRefinedNode(), InitailizeGraph(), IsInterferingSan(), IsNeighber(), IsNeighberSan(), Plan(), and SearchForSequence(). |
|
|
Definition at line 93 of file PL_Sandros.h. Referenced by ConstructGraph(), and DealwithSequence(). |
|
|
Definition at line 76 of file PL_Sandros.h. Referenced by Plan(). |
|
|
Definition at line 77 of file PL_Sandros.h. Referenced by ConstructGraph(), PL_Sandros(), and Plan(). |
|
|
Definition at line 95 of file PL_Sandros.h. Referenced by SearchForSequence(). |
|
|
Definition at line 88 of file PL_Sandros.h. Referenced by ConstructGraph(). |
|
|
Definition at line 90 of file PL_Sandros.h. Referenced by ConstructGraph(), DealwithSequence(), and SaveSandrosPath(). |
|
|
Definition at line 83 of file PL_Sandros.h. Referenced by ConstructGraph(), DealwithSequence(), and SaveSandrosPath(). |
|
|
Definition at line 86 of file PL_Sandros.h. |
|
|
Definition at line 92 of file PL_Sandros.h. Referenced by ConstructGraph(), DealwithSequence(), SaveSandrosPath(), and SearchForSequence(). |
|
|
Definition at line 80 of file PL_Sandros.h. Referenced by ConstructGraph(), DealwithSequence(), and FindNextNodeToRefined(). |
|
|
Definition at line 84 of file PL_Sandros.h. |
|
|
Definition at line 87 of file PL_Sandros.h. Referenced by ConstructGraph(), and DealwithSequence(). |
|
|
Definition at line 104 of file PL_Sandros.h. Referenced by GenerateNewNodeGrid(), and PL_Sandros(). |
|
|
Definition at line 106 of file PL_Sandros.h. Referenced by ConstructGraph(), GetRefinedNode(), and PL_Sandros(). |
|
|
Definition at line 105 of file PL_Sandros.h. Referenced by ConstructGraph(), and GetRefinedNode(). |
|
|
Definition at line 75 of file PL_Sandros.h. Referenced by DealwithSequence(), PL_Sandros(), Plan(), SetGoalConfig(), and SetStartConfig(). |
|
|
Definition at line 99 of file PL_Sandros.h. Referenced by GenerateNewNodeGrid(), and PL_Sandros(). |
|
|
Definition at line 103 of file PL_Sandros.h. Referenced by ConstructGraph(), GenerateNewNodeGrid(), PL_Sandros(), and SetValue(). |
|
|
Definition at line 102 of file PL_Sandros.h. Referenced by ConstructGraph(), PL_Sandros(), and SetValue(). |
|
|
Definition at line 98 of file PL_Sandros.h. Referenced by ConstructGraph(), PL_Sandros(), and SetValue(). |
 1.4.6-NO
1.4.6-NO