#include <planners/PL_GraphBase.h>
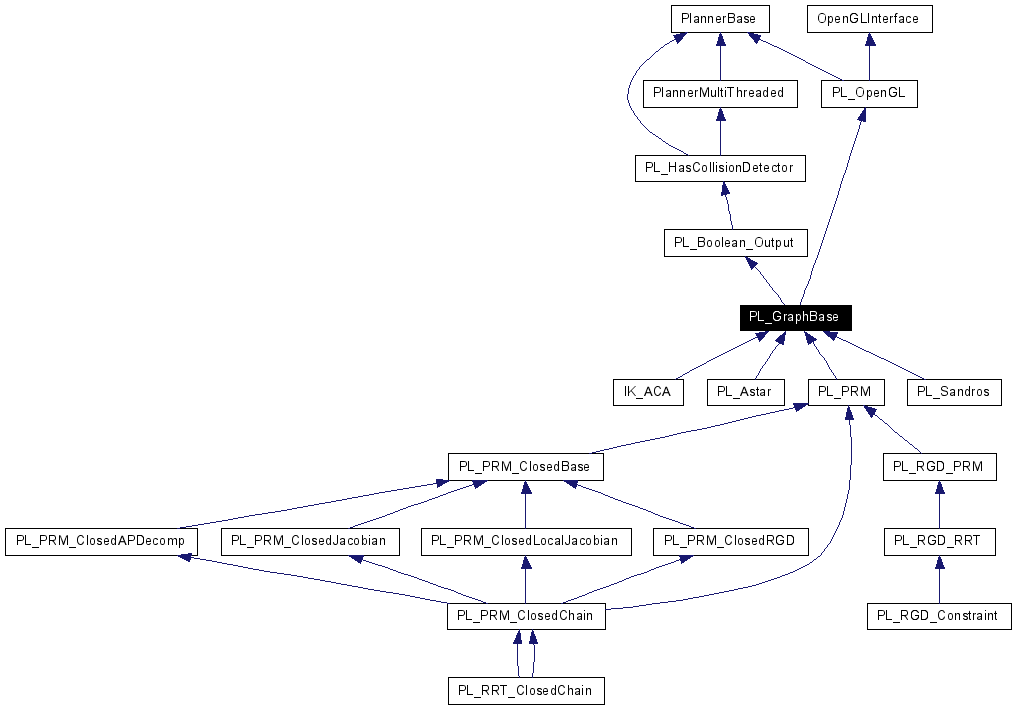
Inherits PL_Boolean_Output, and PL_OpenGL.
Inherited by IK_ACA [virtual], PL_Astar, PL_PRM, and PL_Sandros.
Inheritance diagram for PL_GraphBase:
Public Member Functions | |
| PL_GraphBase () | |
| virtual | ~PL_GraphBase () |
| virtual bool | DrawExplicit () const |
| virtual bool | Load (const char *filename) |
| virtual bool | Plan () |
| bool | Save (const char *filename) const |
| virtual void | SetStartConfig (const Configuration &configuration) |
| virtual void | SetGoalConfig (const Configuration &config) |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
| int | NodeCount () const |
| int | EdgeCount () const |
| virtual void | ClearGraph () |
| void | ClearGraphPath () |
| void | NormDistWeight () |
| virtual void | SetDistWeight (const VectorN &weights) |
| VectorN | GetDistWeight () const |
| void | CopySettings (PlannerBase *original) |
Protected Member Functions | |
| virtual double | Distance (const node &a, const node &b) const |
| virtual double | Distance (const Configuration &a, const Configuration &b) const |
| virtual double | Distance (const node &a, const node &b, const VectorN &weight) const |
| virtual double | Distance (const Configuration &a, const Configuration &b, const VectorN &weight) const |
| virtual VectorN | DiffV (const node &a, const node &b) const |
| virtual VectorN | DiffV (const Configuration &a, const Configuration &b) const |
| double | Length (const edge &e1) const |
| double | Measure (const edge &e1) const |
| double | Measure (const edge &e1, const VectorN &weight) const |
| double | GetCspaceRange (const VectorN &weight) const |
| double | GetCspaceRange () const |
| node | FindConfig (const Configuration &c1) const |
| edge | FindEdge (const node &n1, const node &n2) const |
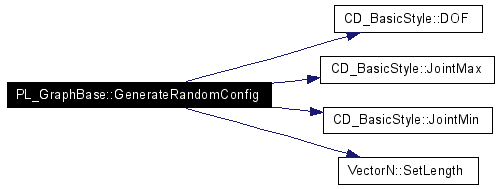
| virtual Configuration | GenerateRandomConfig () |
| virtual Configuration | GenerateRandomConfig (const Configuration &seed, const double &std_dev) |
| virtual Configuration | GenerateRandomConfig (const Configuration ¢re) |
| virtual bool | IsInterfering (const edge &e1) |
| virtual bool | IsInterfering (const node &n1) |
| virtual bool | IsInterfering (const Configuration &c1) |
| virtual bool | IsInterfering (const node &n1, const node &n2) |
| virtual bool | IsInterfering (const Configuration &c1, const Configuration &c2) |
| void | GetCoords (const node n1, double &Xcor, double &Ycor, double &Zcor) const |
| void | GetCoords (const Configuration &c1, double &Xcor, double &Ycor, double &Zcor) const |
| virtual bool | DrawSpecific () const |
| bool | PrioritizeEdge (node prev, node curr) |
| bool | PrioritizeEdge (node source, edge e1) |
| Configuration | GetMidPoint (const Configuration &a, const Configuration &b) const |
| virtual SuccessResultType | TranslatePath () |
| virtual bool | SaveContents (std::ofstream &outfile) const |
| virtual bool | LoadContents (std::ifstream &infile) |
| node | TranslateNodeID (const int &nodeID) const |
Protected Attributes | |
| GRAPH< Configuration, double > | G |
| node | startNode |
| node | goalNode |
| node_list | graphPath |
| VectorN | distWeight |
| char | fileext [10] |
| char | fileheader [20] |
Static Protected Attributes | |
| static const int | NIL_ID = -1 |
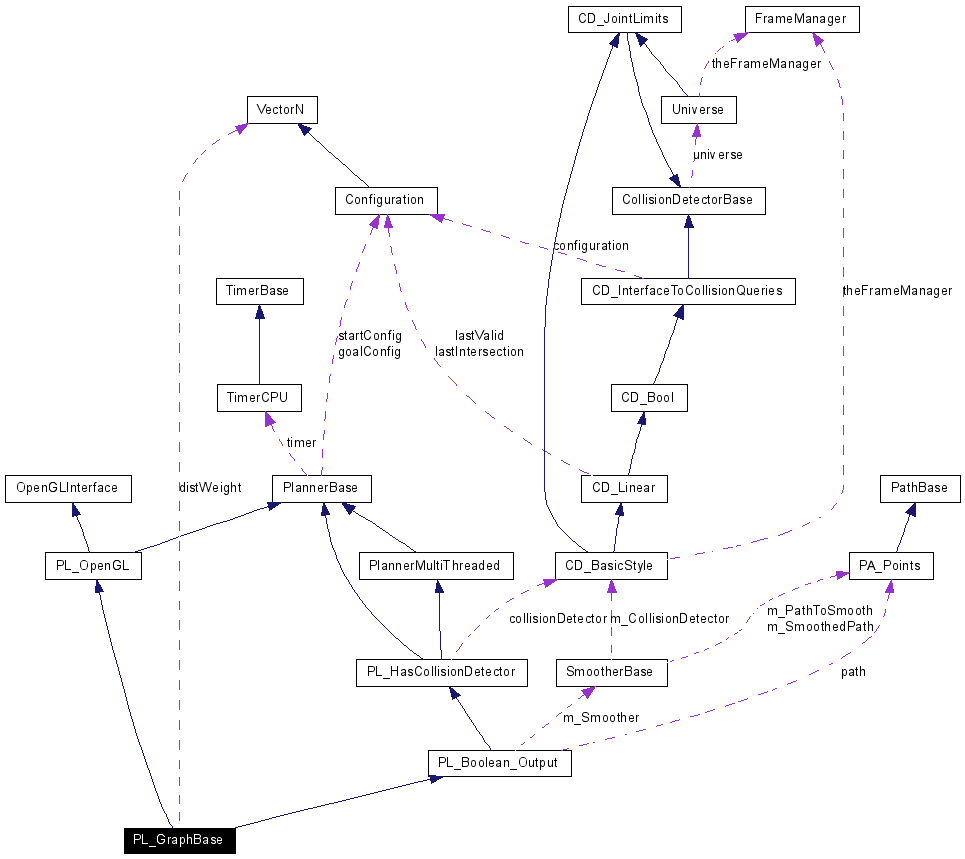
Definition at line 34 of file PL_GraphBase.h.
|
|
Definition at line 43 of file PL_GraphBase.cpp. References ClearGraph(), FILEEXT, fileext, FILEHEADER, fileheader, and NormDistWeight(). Here is the call graph for this function:  |
|
|
Definition at line 62 of file PL_GraphBase.cpp. |
|
|
Reimplemented in PL_Astar, and PL_Sandros. Definition at line 402 of file PL_GraphBase.cpp. References G. Referenced by PL_Sandros::ClearGraph(), PL_Astar::ClearGraph(), PL_GraphBase(), SetDistWeight(), PL_PRM::SetGraphMode(), IK_ACA::SetStartConfig(), and PL_RGD_Constraint::SetStrategy(). |
|
|
Definition at line 419 of file PL_GraphBase.cpp. References graphPath. Referenced by IK_ACA::ComputePath(), PL_Astar::InitNewSearch(), and IK_ACA::Plan(). |
|
|
Reimplemented from PlannerBase. Reimplemented in PL_Astar, IK_ACA, and PL_PRM. Definition at line 1204 of file PL_GraphBase.cpp. References distWeight. Referenced by PL_PRM::CopySettings(), IK_ACA::CopySettings(), and PL_Astar::CopySettings(). |
|
||||||||||||
|
Definition at line 487 of file PL_GraphBase.cpp. |
|
||||||||||||
|
Definition at line 480 of file PL_GraphBase.cpp. |
|
||||||||||||||||
|
Definition at line 458 of file PL_GraphBase.cpp. References VectorN::Length(), and Sqr(). Here is the call graph for this function: 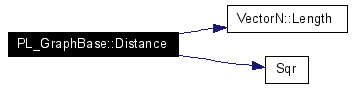 |
|
||||||||||||||||
|
Definition at line 444 of file PL_GraphBase.cpp. |
|
||||||||||||
|
Definition at line 451 of file PL_GraphBase.cpp. |
|
||||||||||||
|
|
Reimplemented from PL_OpenGL. Reimplemented in PL_RGD_RRT, PL_RGD_Constraint, PL_RRT_ClosedChain, PL_RRT_ClosedChain, IK_ACA, PL_PRM, and PL_Sandros. Definition at line 73 of file PL_GraphBase.cpp. References Color::cyan, DrawSpecific(), G, GetCoords(), goalNode, graphPath, Semaphore::Lock(), Color::orange, Color::red, startNode, and Color::yellow. Referenced by IK_ACA::DrawExplicit(). Here is the call graph for this function:  |
|
|
Reimplemented in IK_ACA. Definition at line 884 of file PL_GraphBase.cpp. Referenced by PL_PRM::DrawExplicit(), and DrawExplicit(). |
|
|
Definition at line 64 of file PL_GraphBase.h. References G. |
|
|
Definition at line 608 of file PL_GraphBase.cpp. References COMPTOL. Referenced by LoadContents(), SetGoalConfig(), and SetStartConfig(). |
|
||||||||||||
|
Definition at line 629 of file PL_GraphBase.cpp. |
|
|
Definition at line 701 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), and VectorN::SetLength(). Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented in PL_RGD_PRM, and PL_PRM_ClosedBase. Definition at line 800 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, distWeight, Configuration::DOF(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), RandNorm(), and VectorN::SetLength(). Here is the call graph for this function:  |
|
|
||||||||||||||||||||
|
Definition at line 901 of file PL_GraphBase.cpp. |
|
||||||||||||||||||||
|
Definition at line 895 of file PL_GraphBase.cpp. Referenced by PL_PRM::DrawExplicit(), DrawExplicit(), and IK_ACA::DrawSpecific(). |
|
|
Definition at line 592 of file PL_GraphBase.cpp. References distWeight. Referenced by PL_PRM::Plan(), PL_RGD_PRM::Plan_As_Usual(), PL_PRM_ClosedChain::Plan_As_Usual(), and PL_PRM::SetCollisionDetector(). |
|
|
Definition at line 552 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), CD_BasicStyle::JointWraps(), and Configuration::SetNumDOF(). Here is the call graph for this function:  |
|
|
Definition at line 73 of file PL_GraphBase.h. References distWeight. |
|
||||||||||||
|
Definition at line 1152 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_JointLimits::JointDisplacement(). Referenced by PL_PRM::ConnectEdgesFull(), PL_PRM_ClosedBase::ConnectEdgesFull(), PL_RGD_PRM::ConnectEdgesFull(), PL_PRM_ClosedChain::ConnectEdgesFull(), PL_PRM::ConnectEdgesLazy(), and IK_ACA::CreateEmbryo(). Here is the call graph for this function: 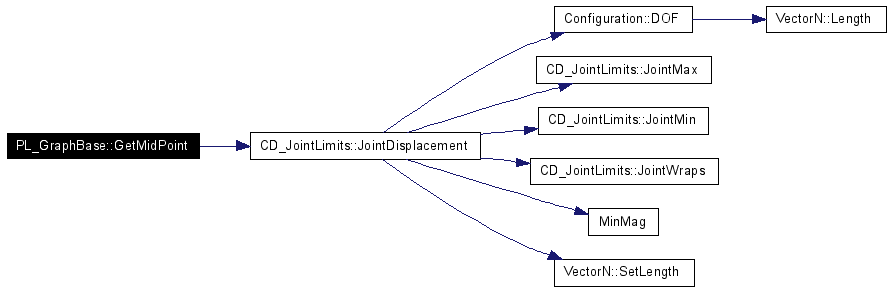 |
|
||||||||||||
|
Reimplemented in PL_RGD_PRM, PL_PRM_ClosedBase, PL_PRM_ClosedRGD, PL_PRM_ClosedLocalJacobian, PL_PRM_ClosedJacobian, PL_PRM_ClosedAPDecomp, and PL_PRM_ClosedChain. Definition at line 856 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_Linear::IsInterferingLinear(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 850 of file PL_GraphBase.cpp. References G, and IsInterfering(). Here is the call graph for this function:  |
|
|
Reimplemented in PL_RGD_PRM, and PL_PRM_ClosedBase. Definition at line 868 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, and CD_Bool::IsInterfering(). Here is the call graph for this function:  |
|
|
Definition at line 862 of file PL_GraphBase.cpp. References G, and IsInterfering(). Here is the call graph for this function:  |
|
|
|
Definition at line 503 of file PL_GraphBase.cpp. |
|
|
Reimplemented from PlannerBase. Reimplemented in IK_ACA, and PL_Sandros. Definition at line 211 of file PL_GraphBase.cpp. References fileext, Semaphore::Lock(), and Semaphore::Unlock(). Referenced by IK_ACA::Load(). Here is the call graph for this function:  |
|
|
Reimplemented in PL_Astar, IK_ACA, and PL_PRM. Definition at line 268 of file PL_GraphBase.cpp. References distWeight, FindConfig(), G, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), goalNode, SetGoalConfig(), SetStartConfig(), and startNode. Referenced by PL_PRM::LoadContents(), IK_ACA::LoadContents(), and PL_Astar::LoadContents(). Here is the call graph for this function: 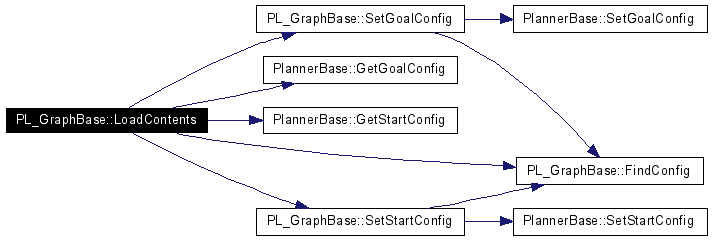 |
|
||||||||||||
|
Definition at line 509 of file PL_GraphBase.cpp. |
|
|
Definition at line 515 of file PL_GraphBase.cpp. |
|
|
Definition at line 63 of file PL_GraphBase.h. References G. Referenced by PL_PRM::BuildInitRoadMap(), and PL_Astar::SetGoalConfig(). |
|
|
Definition at line 528 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, distWeight, CD_BasicStyle::DOF(), and VectorN::SetLength(). Referenced by PL_GraphBase(), and SetCollisionDetector(). Here is the call graph for this function:  |
|
|
Implements PlannerBase. Reimplemented in PL_Astar, PL_PRM_ClosedChain, PL_RGD_PRM, PL_RGD_RRT, PL_RGD_Constraint, PL_RRT_ClosedChain, PL_PRM_ClosedBase, PL_PRM_ClosedLocalJacobian, PL_PRM_ClosedChain, PL_RRT_ClosedChain, IK_ACA, PL_PRM, and PL_Sandros. Definition at line 308 of file PL_GraphBase.cpp. |
|
||||||||||||
|
Definition at line 1068 of file PL_GraphBase.cpp. |
|
||||||||||||
|
Definition at line 1106 of file PL_GraphBase.cpp. |
|
|
Reimplemented from PlannerBase. Reimplemented in IK_ACA, and PL_Sandros. Definition at line 319 of file PL_GraphBase.cpp. References fileext, Semaphore::Lock(), and Semaphore::Unlock(). Referenced by IK_ACA::Save(). Here is the call graph for this function:  |
|
|
Reimplemented in PL_Astar, IK_ACA, and PL_PRM. Definition at line 361 of file PL_GraphBase.cpp. References distWeight, G, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), goalNode, NIL_ID, and startNode. Referenced by PL_PRM::SaveContents(), IK_ACA::SaveContents(), and PL_Astar::SaveContents(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_HasCollisionDetector. Reimplemented in PL_Astar, PL_PRM_ClosedChain, PL_RGD_PRM, PL_RRT_ClosedChain, PL_PRM_ClosedLocalJacobian, PL_PRM_ClosedJacobian, PL_PRM_ClosedAPDecomp, PL_PRM_ClosedChain, PL_RRT_ClosedChain, PL_PRM, and PL_Sandros. Definition at line 1014 of file PL_GraphBase.cpp. References PL_HasCollisionDetector::collisionDetector, distWeight, CD_BasicStyle::DOF(), VectorN::Length(), NormDistWeight(), and PL_HasCollisionDetector::SetCollisionDetector(). Referenced by PL_Sandros::SetCollisionDetector(), PL_PRM::SetCollisionDetector(), IK_ACA::SetCollisionDetector(), and PL_Astar::SetCollisionDetector(). Here is the call graph for this function:  |
|
|
Definition at line 1041 of file PL_GraphBase.cpp. References ClearGraph(), and distWeight. Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Reimplemented in PL_Astar, IK_ACA, PL_PRM, and PL_Sandros. Definition at line 992 of file PL_GraphBase.cpp. References FindConfig(), G, goalNode, and PlannerBase::SetGoalConfig(). Referenced by IK_ACA::AssignGoalConfig(), LoadContents(), PL_Sandros::SetGoalConfig(), PL_PRM::SetGoalConfig(), PL_Astar::SetGoalConfig(), PL_Sandros::SetStartConfig(), and PL_Astar::SetStartConfig(). Here is the call graph for this function:  |
|
|
Reimplemented from PlannerBase. Reimplemented in PL_Astar, IK_ACA, PL_PRM, and PL_Sandros. Definition at line 967 of file PL_GraphBase.cpp. References FindConfig(), G, PlannerBase::SetStartConfig(), and startNode. Referenced by LoadContents(), PL_Sandros::SetStartConfig(), PL_PRM::SetStartConfig(), IK_ACA::SetStartConfig(), and PL_Astar::SetStartConfig(). Here is the call graph for this function:  |
|
|
Definition at line 1220 of file PL_GraphBase.cpp. |
|
|
Reimplemented in PL_PRM_ClosedChain, PL_RGD_PRM, and PL_PRM_ClosedBase. Definition at line 1170 of file PL_GraphBase.cpp. References PA_Points::AppendPoint(), PA_Points::Clear(), FAIL, PlannerBase::GetStartConfig(), graphPath, and PL_Boolean_Output::path. Referenced by IK_ACA::ComputePath(), PL_Sandros::Plan(), PL_PRM::Plan(), and PL_Astar::Plan(). Here is the call graph for this function:  |
|
|
Definition at line 188 of file PL_GraphBase.h. Referenced by CopySettings(), GenerateRandomConfig(), GetCspaceRange(), GetDistWeight(), LoadContents(), NormDistWeight(), SaveContents(), SetCollisionDetector(), and SetDistWeight(). |
|
|
Definition at line 192 of file PL_GraphBase.h. Referenced by IK_ACA::IK_ACA(), Load(), PL_Astar::PL_Astar(), PL_GraphBase(), PL_PRM::PL_PRM(), and Save(). |
|
|
Definition at line 193 of file PL_GraphBase.h. Referenced by IK_ACA::IK_ACA(), PL_Astar::PL_Astar(), PL_GraphBase(), and PL_PRM::PL_PRM(). |
|
|
|
|
|
Definition at line 194 of file PL_GraphBase.h. Referenced by PL_PRM::ConnectEdgesFull(), PL_PRM_ClosedBase::ConnectEdgesFull(), PL_RGD_PRM::ConnectEdgesFull(), PL_PRM_ClosedChain::ConnectEdgesFull(), PL_PRM::LoadContents(), PL_PRM::SaveContents(), SaveContents(), and TranslateNodeID(). |
|
 1.4.6-NO
1.4.6-NO