#include <collisiondetectors/CD_BasicStyle.h>
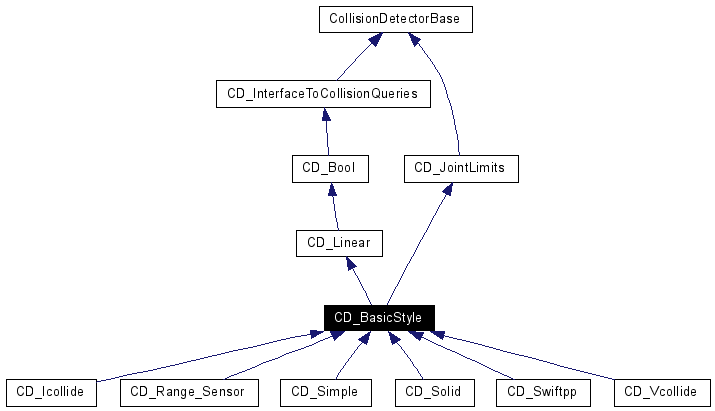
Inherits CD_Linear, and CD_JointLimits.
Inherited by CD_Icollide, CD_Range_Sensor, CD_Simple, CD_Solid, CD_Swiftpp, and CD_Vcollide.
Inheritance diagram for CD_BasicStyle:
Public Member Functions | |
| CD_BasicStyle (const Universe &universe) | |
| CD_BasicStyle (const CD_BasicStyle &right) | |
| virtual | ~CD_BasicStyle () |
| FrameManager * | GetFrameManager () |
| virtual bool | SetConfiguration (const Configuration &config) |
| virtual DH_Parameter | JointType (const unsigned int jointNum) const |
| virtual unsigned int | JointFrameNum (const unsigned int jointNum) const |
| virtual double | JointMin (const unsigned int jointNum) const |
| virtual bool | JointWraps (const unsigned int jointNum) const |
| virtual double | JointMax (const unsigned int jointNum) const |
| virtual CollisionDetectorBase * | Clone () const =0 |
| virtual bool | ShouldPerformCollisionCheck (unsigned int frameA, unsigned int frameB) const |
| virtual unsigned int | DOF () const |
| virtual void | DeactivateFrames (const unsigned int frame1, const unsigned int frame2) |
| virtual void | ActivateFrames (const unsigned int frame1, const unsigned int frame2) |
| virtual void | PermDeactivateFrames (const unsigned int frame1, const unsigned int frame2) |
| virtual void | PermActivateFrames (const unsigned int frame1, const unsigned int frame2) |
| bool | FramePairPermEnabled (const unsigned int frame1, const unsigned int frame2) const |
| void | DeactivateAllFrames () |
| std::vector< Entity * > | GetAllElements () const |
| std::vector< LinkBase * > | GetAllLinks () const |
| RobotBase * | GetRobot (const int index) const |
Protected Member Functions | |
| virtual void | PermActivateAll () |
| virtual void | PermDeactivateFramesWithThemselves () |
| virtual void | PermDeactivateAll () |
Protected Attributes | |
| std::map< PairInt, bool > | collisionMatrix |
| std::map< PairInt, bool > | permCollisionMatrix |
| std::vector< Entity * > | entities |
| std::vector< LinkBase * > | links |
| FrameManager | theFrameManager |
Definition at line 17 of file CD_BasicStyle.h.
|
|
Definition at line 8 of file CD_BasicStyle.cpp. References entities, Universe::GetAllEntities(), Universe::GetFrameManager(), Entity::SetFrameManager(), theFrameManager, and CollisionDetectorBase::universe. Here is the call graph for this function: 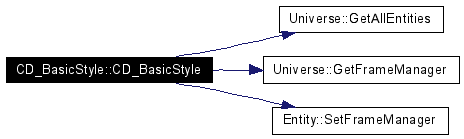 |
|
|
Definition at line 42 of file CD_BasicStyle.cpp. References entities. |
|
|
Definition at line 75 of file CD_BasicStyle.cpp. References entities. |
|
||||||||||||
|
Reimplemented in CD_Solid, and CD_Vcollide. Definition at line 255 of file CD_BasicStyle.cpp. Referenced by CD_Vcollide::ActivateFrames(), CD_Swiftpp::ActivateFrames(), PL_Sandros::GenerateNewNodeGrid(), PermActivateFrames(), and PL_Sequential::plan_path_for_nth_link(). |
|
|
Implements CollisionDetectorBase. Implemented in CD_Icollide, CD_Range_Sensor, CD_Simple, CD_Solid, CD_Swiftpp, and CD_Vcollide. |
|
|
Definition at line 350 of file CD_BasicStyle.cpp. References DeactivateFrames(), and DOF(). Here is the call graph for this function:  |
|
||||||||||||
|
Reimplemented in CD_Solid, and CD_Vcollide. Definition at line 221 of file CD_BasicStyle.cpp. References collisionMatrix, and FramePairPermEnabled(). Referenced by DeactivateAllFrames(), CD_Vcollide::DeactivateFrames(), CD_Swiftpp::DeactivateFrames(), PL_Sandros::GenerateNewNodeGrid(), PermDeactivateFrames(), PL_Sequential::SetCollisionDetector(), PL_ForTest::SetCollisionDetector(), PL_PRM_ClosedJacobian::SetCollisionDetector(), PL_PRM_ClosedLocalJacobian::SetCollisionDetector(), PL_RRT_ClosedChain::SetCollisionDetector(), PL_RGD_PRM::SetCollisionDetector(), and PL_PRM_ClosedChain::SetCollisionDetector(). Here is the call graph for this function:  |
|
|
||||||||||||
|
Definition at line 331 of file CD_BasicStyle.cpp. References permCollisionMatrix. Referenced by CD_Vcollide::ActivateFrames(), CD_Swiftpp::ActivateFrames(), DeactivateFrames(), and PermActivateFrames(). |
|
|
Definition at line 421 of file CD_BasicStyle.cpp. References entities. Referenced by PL_ATACE::CreateTrajectoryCD(). |
|
|
Definition at line 415 of file CD_BasicStyle.cpp. References links. |
|
|
|
|
Definition at line 147 of file CD_BasicStyle.cpp. References links. Referenced by IK_ACA::FindJointAdjust(), IK_InvKinBase::GetToolFrame(), PL_PRM_ClosedBase::GetToolFrame(), PL_RGD_PRM::GetToolFrame(), and PL_PRM_ClosedChain::GetToolFrame(). |
|
|
|
|
Definition at line 138 of file CD_BasicStyle.cpp. References links. Referenced by IK_ACA::FindJointAdjust(). |
|
|
Implements CD_JointLimits. Definition at line 154 of file CD_BasicStyle.cpp. References links. Referenced by PL_Astar::ExpandNode(), PL_GraphBase::GetCspaceRange(), and IK_ACA::MinimizeDistance(). |
|
|
Definition at line 363 of file CD_BasicStyle.cpp. References DOF(), and PermActivateFrames(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 312 of file CD_BasicStyle.cpp. References ActivateFrames(), FramePairPermEnabled(), and permCollisionMatrix. Referenced by PermActivateAll(). Here is the call graph for this function:  |
|
|
Definition at line 401 of file CD_BasicStyle.cpp. References DOF(), and PermDeactivateFrames(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 277 of file CD_BasicStyle.cpp. References DeactivateFrames(), and permCollisionMatrix. Referenced by PermDeactivateAll(), and PermDeactivateFramesWithThemselves(). Here is the call graph for this function:  |
|
|
Definition at line 391 of file CD_BasicStyle.cpp. References DOF(), and PermDeactivateFrames(). Here is the call graph for this function:  |
|
|
Reimplemented from CD_InterfaceToCollisionQueries. Definition at line 96 of file CD_BasicStyle.cpp. References IJG_Assert, VectorN::Length(), links, and CD_InterfaceToCollisionQueries::SetConfiguration(). Referenced by CRedundant::GetDesireFrameByConfiguration(), IK_InvKinBase::GetToolFrame(), PL_PRM_ClosedBase::GetToolFrame(), PL_RGD_PRM::GetToolFrame(), PL_PRM_ClosedChain::GetToolFrame(), CD_Vcollide::IsInterfering(), CD_Swiftpp::IsInterfering(), and CD_Swiftpp::QueryContactDetermination(). Here is the call graph for this function:  |
|
||||||||||||
|
Implements CD_InterfaceToCollisionQueries. Definition at line 163 of file CD_BasicStyle.cpp. Referenced by CD_Simple::IsInterfering(). |
|
|
Definition at line 94 of file CD_BasicStyle.h. Referenced by DeactivateFrames(). |
|
|
Definition at line 96 of file CD_BasicStyle.h. Referenced by CD_BasicStyle(), CD_Solid::CD_Solid(), CD_Swiftpp::CD_Swiftpp(), CD_Vcollide::CD_Vcollide(), GetAllElements(), GetRobot(), CD_Simple::IsInterfering(), and ~CD_BasicStyle(). |
|
|
Definition at line 97 of file CD_BasicStyle.h. Referenced by DOF(), GetAllLinks(), JointFrameNum(), JointMax(), JointMin(), JointType(), JointWraps(), SetConfiguration(), and CD_Vcollide::UpdateMovedLink(). |
|
|
Definition at line 95 of file CD_BasicStyle.h. Referenced by FramePairPermEnabled(), PermActivateFrames(), and PermDeactivateFrames(). |
|
|
Definition at line 98 of file CD_BasicStyle.h. Referenced by CD_BasicStyle(), CD_Solid::CD_Solid(), CD_Swiftpp::CD_Swiftpp(), CD_Vcollide::CD_Vcollide(), and GetFrameManager(). |
 1.4.6-NO
1.4.6-NO