#include <planners/astar/PL_Astar.h>
Inherits PL_GraphBase.
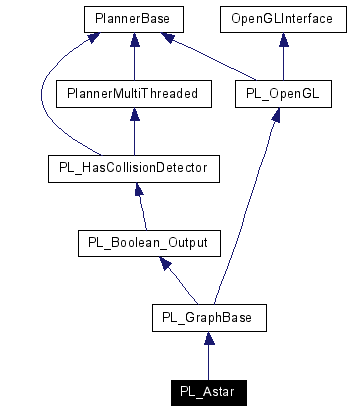
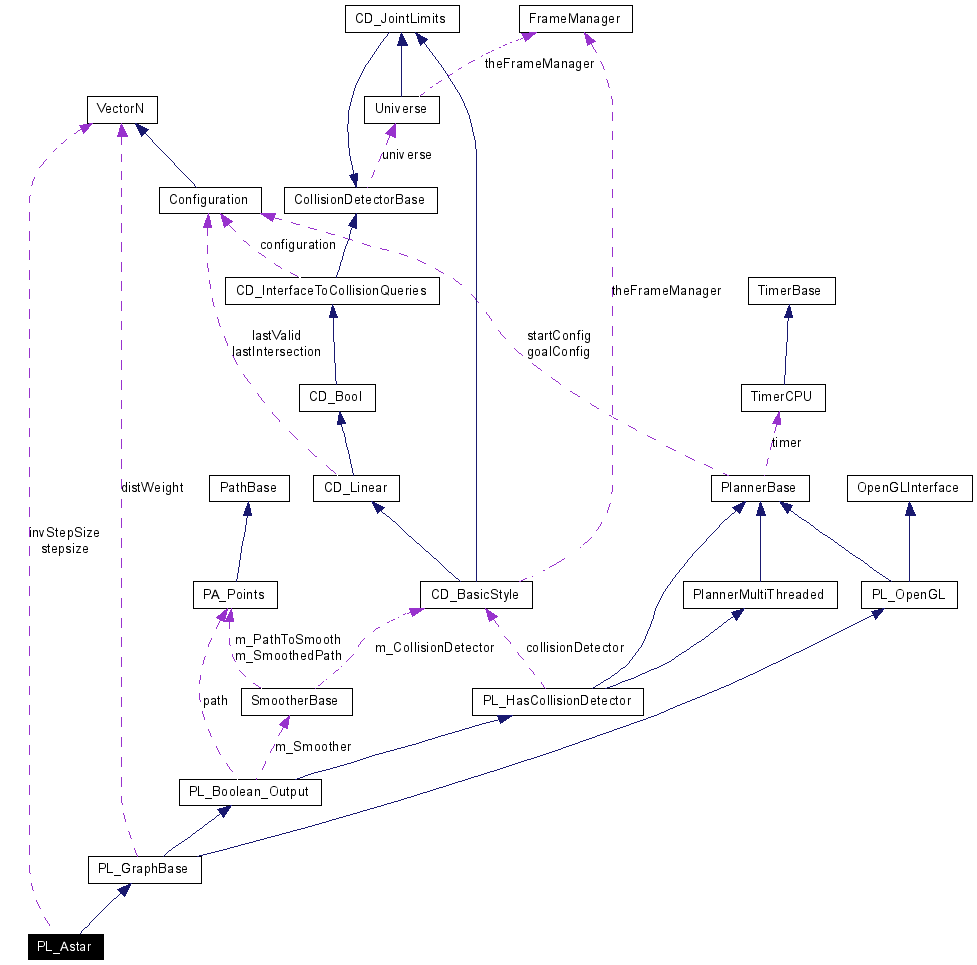
Inheritance diagram for PL_Astar:
Public Member Functions | |
| virtual | ~PL_Astar () |
| PL_Astar () | |
| virtual bool | Plan () |
| virtual void | SetStartConfig (const Configuration &config) |
| virtual void | SetGoalConfig (const Configuration &config) |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
| virtual void | ClearGraph () |
| void | SetDefaultStepSize () |
| void | SetStepSize (const VectorN &newstepsize) |
| VectorN | GetStepSize () const |
| void | SetCostWeight (const double &cost) |
| double | GetCostWeight () const |
| void | CopySettings (PlannerBase *original) |
Protected Member Functions | |
| virtual double | Astar_f (const node &n, const double &currcost) const |
| double | AlignJoint (const int &jointNum, const double &jointValue) const |
| Configuration | AlignConfig (const Configuration &config) const |
| void | ExpandNode (const node &n) |
| void | InitNewSearch () |
| virtual bool | SaveContents (std::ofstream &outfile) const |
| virtual bool | LoadContents (std::ifstream &infile) |
Protected Attributes | |
| node_map< bool > | nodeExpanded |
| node_map< node > | pred |
| node_map< double > | dist |
| node_pq< double > * | openp |
| VectorN | stepsize |
| VectorN | invStepSize |
| bool | goalOnGrid |
| SuccessResultType | plan_success |
| double | weight |
Private Member Functions | |
| void | InvertStepSize () |
Definition at line 27 of file PL_Astar.h.
|
|
Definition at line 59 of file PL_Astar.cpp. References openp. |
|
|
Definition at line 36 of file PL_Astar.cpp. References ClearGraph(), DEFAULTWEIGHT, FILEEXT, PL_GraphBase::fileext, FILEHEADER, PL_GraphBase::fileheader, openp, SetDefaultStepSize(), and weight. Here is the call graph for this function: 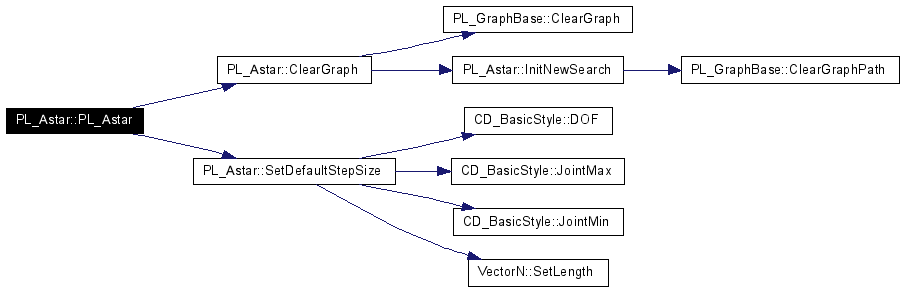 |
|
|
Definition at line 711 of file PL_Astar.cpp. References AlignJoint(), Configuration::DOF(), and Configuration::SetNumDOF(). Referenced by SetGoalConfig(), and SetStartConfig(). Here is the call graph for this function: 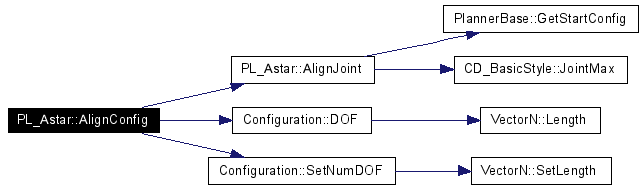 |
|
||||||||||||
|
Definition at line 662 of file PL_Astar.cpp. References PL_HasCollisionDetector::collisionDetector, PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), and stepsize. Referenced by AlignConfig(), and ExpandNode(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 580 of file PL_Astar.cpp. References PL_GraphBase::Distance(), PL_GraphBase::goalNode, and weight. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 76 of file PL_Astar.cpp. References PL_GraphBase::ClearGraph(), FALSE, PL_GraphBase::G, InitNewSearch(), and nodeExpanded. Referenced by PL_Astar(), SetStartConfig(), and SetStepSize(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 880 of file PL_Astar.cpp. References PL_GraphBase::CopySettings(), invStepSize, stepsize, and weight. Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function:  |
|
|
Definition at line 735 of file PL_Astar.cpp. References AlignJoint(), PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), PL_GraphBase::G, CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), CD_BasicStyle::JointWraps(), nodeExpanded, and stepsize. Referenced by Plan(). Here is the call graph for this function:  |
|
|
Definition at line 58 of file PL_Astar.h. References weight. |
|
|
Definition at line 55 of file PL_Astar.h. References stepsize. |
|
|
Definition at line 93 of file PL_Astar.cpp. References PL_GraphBase::ClearGraphPath(), dist, PL_GraphBase::G, openp, plan_success, pred, PL_GraphBase::startNode, and TIMER_EXPIRED. Referenced by ClearGraph(), LoadContents(), SetGoalConfig(), and SetStartConfig(). Here is the call graph for this function:  |
|
|
Definition at line 592 of file PL_Astar.cpp. References invStepSize, VectorN::Length(), VectorN::SetLength(), and stepsize. Referenced by LoadContents(), and SetStepSize(). Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 130 of file PL_Astar.cpp. References PL_GraphBase::G, goalOnGrid, InitNewSearch(), InvertStepSize(), PL_GraphBase::LoadContents(), nodeExpanded, stepsize, and weight. Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 200 of file PL_Astar.cpp. References Astar_f(), dist, ExpandNode(), FAIL, PL_GraphBase::G, PL_GraphBase::goalNode, PL_GraphBase::graphPath, PlannerBase::guid, PlannerBase::HasTimeLimitExpired(), Semaphore::Lock(), openp, PASS, plan_success, pred, PL_GraphBase::startNode, PlannerBase::StartTimer(), TIMER_EXPIRED, and PL_GraphBase::TranslatePath(). Here is the call graph for this function: 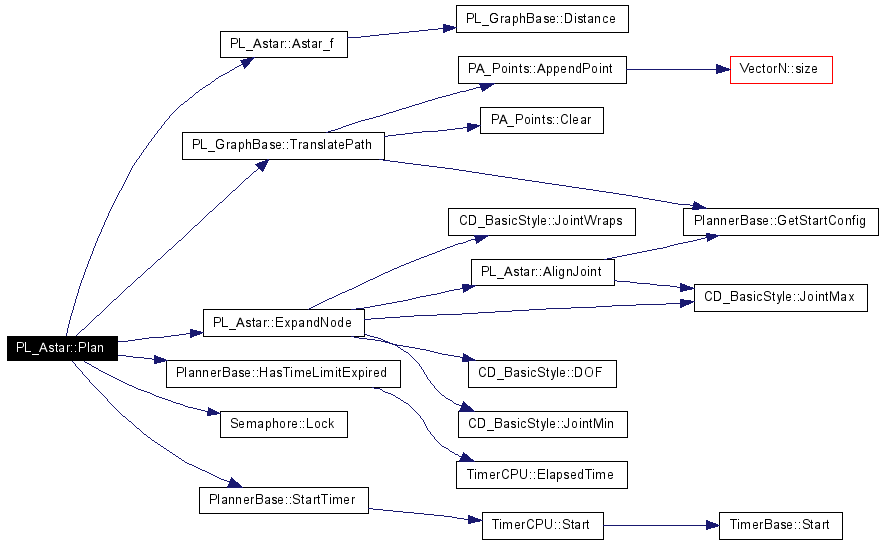 |
|
|
Reimplemented from PL_GraphBase. Definition at line 169 of file PL_Astar.cpp. References PL_GraphBase::G, goalOnGrid, nodeExpanded, PL_GraphBase::SaveContents(), stepsize, and weight. Here is the call graph for this function:  |
|
|
Reimplemented from PL_GraphBase. Definition at line 559 of file PL_Astar.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DOF(), VectorN::Length(), PL_GraphBase::SetCollisionDetector(), SetDefaultStepSize(), and stepsize. Referenced by ServerBase::RefreshPlanner(). Here is the call graph for this function: 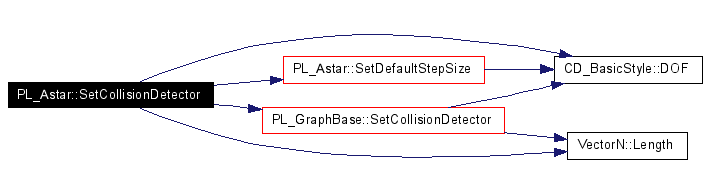 |
|
|
Definition at line 57 of file PL_Astar.h. References weight. |
|
|
Definition at line 635 of file PL_Astar.cpp. References PL_HasCollisionDetector::collisionDetector, DEFAULTNUMSTEPS, CD_BasicStyle::DOF(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), VectorN::SetLength(), and stepsize. Referenced by PL_Astar(), and SetCollisionDetector(). Here is the call graph for this function: 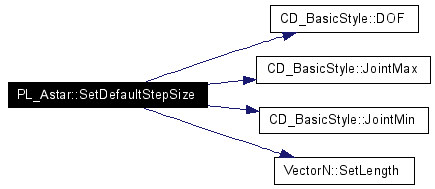 |
|
|
Reimplemented from PL_GraphBase. Definition at line 474 of file PL_Astar.cpp. References AlignConfig(), COMPTOL, dist, PL_GraphBase::Distance(), FAIL, FALSE, PL_GraphBase::G, PlannerBase::GetGoalConfig(), PL_GraphBase::goalNode, goalOnGrid, InitNewSearch(), invStepSize, PL_GraphBase::IsInterfering(), PL_GraphBase::NodeCount(), nodeExpanded, plan_success, PL_GraphBase::SetGoalConfig(), and TRUE. Here is the call graph for this function: 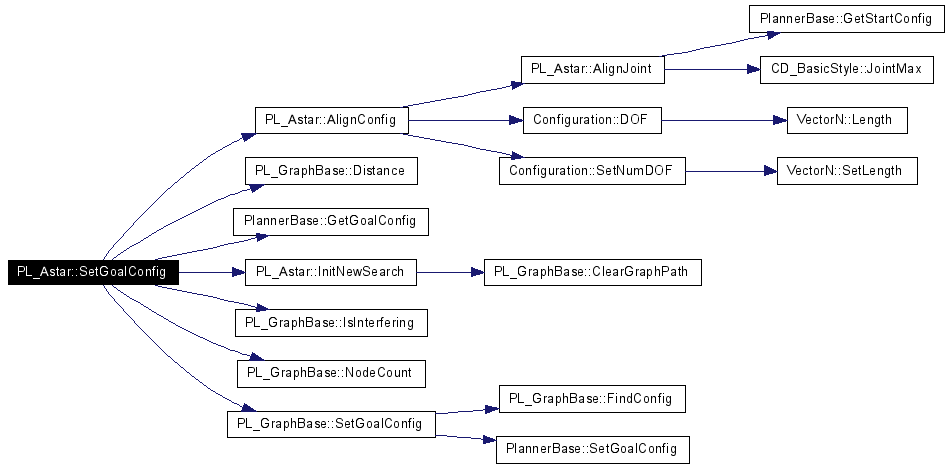 |
|
|
Reimplemented from PL_GraphBase. Definition at line 397 of file PL_Astar.cpp. References AlignConfig(), ClearGraph(), COMPTOL, FAIL, FALSE, PL_GraphBase::G, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), PL_GraphBase::goalNode, goalOnGrid, InitNewSearch(), PL_GraphBase::IsInterfering(), nodeExpanded, plan_success, PL_GraphBase::SetGoalConfig(), PL_GraphBase::SetStartConfig(), VectorN::Size(), PL_GraphBase::startNode, and TRUE. Here is the call graph for this function: 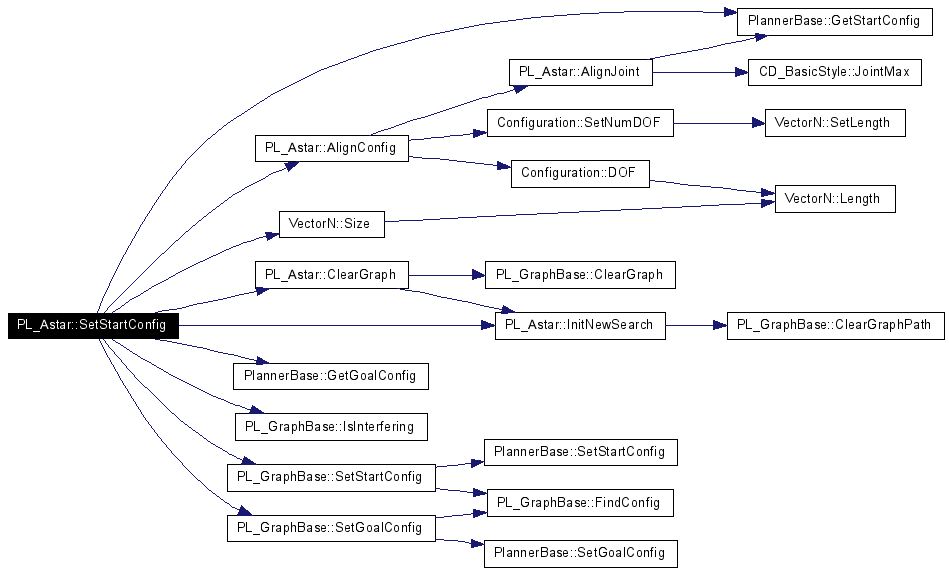 |
|
|
Definition at line 612 of file PL_Astar.cpp. References ClearGraph(), InvertStepSize(), and stepsize. Here is the call graph for this function: 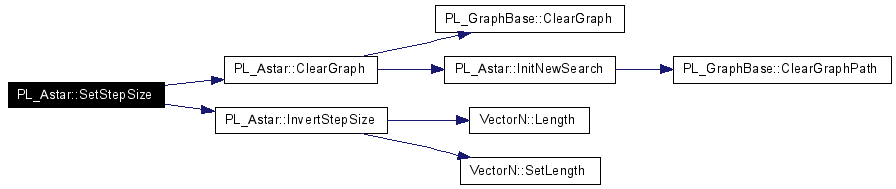 |
|
|
Definition at line 92 of file PL_Astar.h. Referenced by InitNewSearch(), Plan(), and SetGoalConfig(). |
|
|
Definition at line 99 of file PL_Astar.h. Referenced by LoadContents(), SaveContents(), SetGoalConfig(), and SetStartConfig(). |
|
|
Definition at line 97 of file PL_Astar.h. Referenced by CopySettings(), InvertStepSize(), and SetGoalConfig(). |
|
|
Definition at line 89 of file PL_Astar.h. Referenced by ClearGraph(), ExpandNode(), LoadContents(), SaveContents(), SetGoalConfig(), and SetStartConfig(). |
|
|
Definition at line 94 of file PL_Astar.h. Referenced by InitNewSearch(), PL_Astar(), Plan(), and ~PL_Astar(). |
|
|
Definition at line 100 of file PL_Astar.h. Referenced by InitNewSearch(), Plan(), SetGoalConfig(), and SetStartConfig(). |
|
|
Definition at line 91 of file PL_Astar.h. Referenced by InitNewSearch(), and Plan(). |
|
|
Definition at line 96 of file PL_Astar.h. Referenced by AlignJoint(), CopySettings(), ExpandNode(), GetStepSize(), InvertStepSize(), LoadContents(), SaveContents(), SetCollisionDetector(), SetDefaultStepSize(), and SetStepSize(). |
|
|
Definition at line 102 of file PL_Astar.h. Referenced by Astar_f(), CopySettings(), GetCostWeight(), LoadContents(), PL_Astar(), SaveContents(), and SetCostWeight(). |
 1.4.6-NO
1.4.6-NO