#include <planners/atace/LocalPlanner.h>
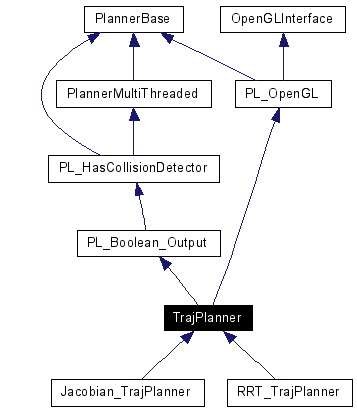
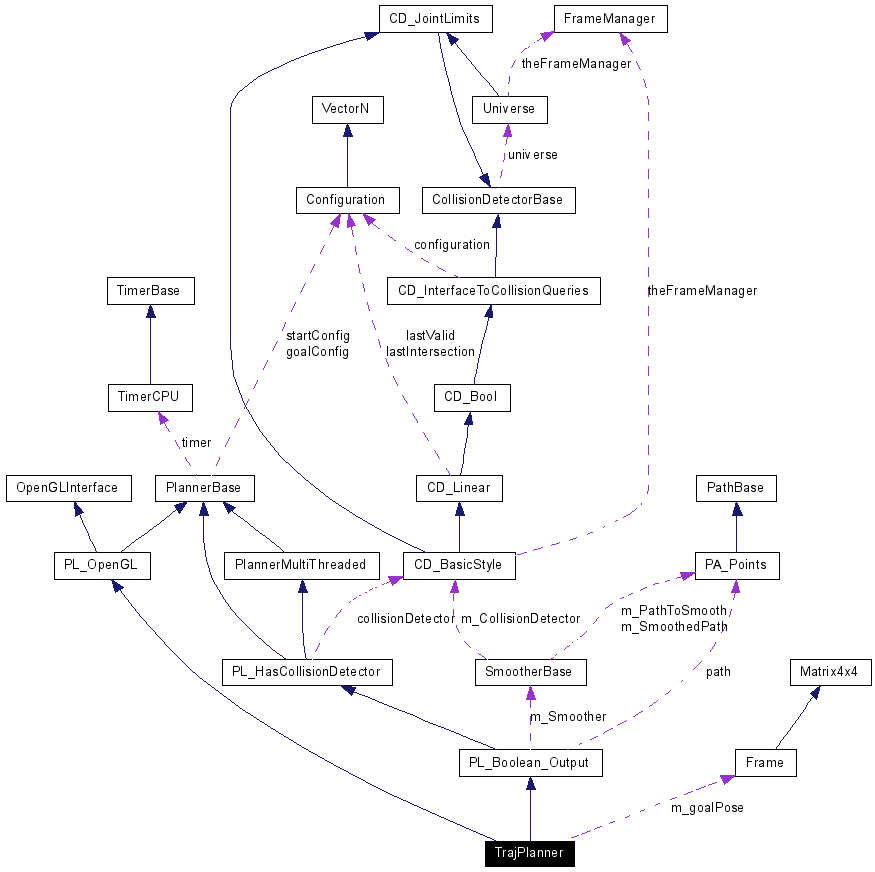
Inherits PL_Boolean_Output, and PL_OpenGL.
Inherited by Jacobian_TrajPlanner, and RRT_TrajPlanner.
Inheritance diagram for TrajPlanner:
Public Member Functions | |
| TrajPlanner () | |
| virtual | ~TrajPlanner () |
| virtual bool | DrawExplicit () const |
| virtual bool | Plan () |
| virtual void | SetGoalPose (Frame &goalPose) |
| virtual void | SetUsingOrientation (bool use) |
| virtual void | SetUseGoalConfig (bool use) |
| virtual void | SetTrajectory (std::vector< Frame > &poses) |
Protected Attributes | |
| Frame | m_goalPose |
| bool | m_bUseOrientation |
| bool | m_bUseGoalConfig |
Definition at line 21 of file LocalPlanner.h.
|
|
Definition at line 44 of file LocalPlanner.cpp. |
|
|
Definition at line 49 of file LocalPlanner.cpp. |
|
|
Reimplemented from PL_OpenGL. Definition at line 54 of file LocalPlanner.cpp. |
|
|
Implements PlannerBase. Reimplemented in RRT_TrajPlanner, and Jacobian_TrajPlanner. Definition at line 27 of file LocalPlanner.h. Referenced by PL_ATACE::ExtendWithConstraint(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 30 of file LocalPlanner.h. References m_goalPose. |
|
|
Reimplemented in RRT_TrajPlanner, and Jacobian_TrajPlanner. Definition at line 33 of file LocalPlanner.h. Referenced by PL_ATACE::ExtendWithConstraint(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 32 of file LocalPlanner.h. References m_bUseGoalConfig. Referenced by PL_ATACE::ExtendWithConstraint(), PL_ForTest::FindLocalPath2(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 31 of file LocalPlanner.h. References m_bUseOrientation. Referenced by PL_ATACE::ExtendWithConstraint(), PL_ForTest::FindLocalPath2(), and PL_ATACE::LazyTrackEEPath(). |
|
|
Definition at line 38 of file LocalPlanner.h. Referenced by RRT_TrajPlanner::Plan(), and SetUseGoalConfig(). |
|
|
Definition at line 37 of file LocalPlanner.h. Referenced by Jacobian_TrajPlanner::Plan(), RRT_TrajPlanner::Plan(), and SetUsingOrientation(). |
|
|
Definition at line 33 of file LocalPlanner.h. Referenced by SetGoalPose(). |
 1.4.6-NO
1.4.6-NO