#include <basic/kinematics/Jacobian.h>
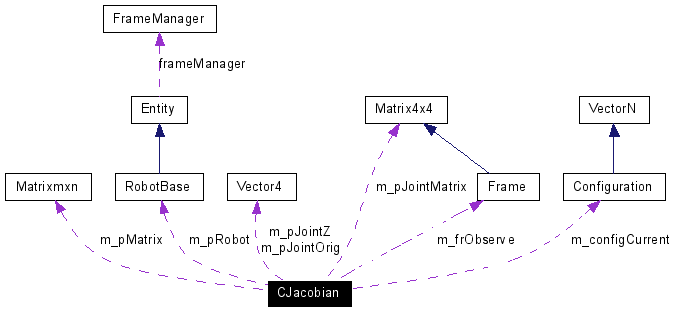
Collaboration diagram for CJacobian:
Public Member Functions | |
| CJacobian (RobotBase &robot) | |
| ~CJacobian () | |
| bool | GetPhyVelocity (VectorN &phyVel, VectorN &jointVel) |
| bool | GetJointVelocity (VectorN &jointVel, VectorN &phyVel) |
| bool | SetInterestPoint (int joint, Frame &endFrame, bool position=true, bool orient=false, int baseJoint=0) |
| bool | SetConfiguration (Configuration &conf) |
| Frame | GetJointFrame (int nJoint) const |
| Frame | GetJointWorldFrame (int nJoint) const |
| Matrixmxn * | GetMatrix () |
Protected Member Functions | |
| bool | Calculate () |
| bool | UpdateJoints () |
Protected Attributes | |
| int | m_nDof |
| int | m_nJoint |
| int | m_nBaseJoint |
| Frame | m_frObserve |
| Matrixmxn * | m_pMatrix |
| Matrix4x4 * | m_pJointMatrix |
| Vector4 * | m_pJointZ |
| Vector4 * | m_pJointOrig |
| RobotBase * | m_pRobot |
| bool | m_bOrientation |
| bool | m_bPosition |
| Configuration | m_configCurrent |
Definition at line 15 of file Jacobian.h.
|
|
Definition at line 38 of file Jacobian.cpp. References RobotBase::DOF(), m_bOrientation, m_bPosition, m_configCurrent, m_nDof, m_nJoint, m_pJointMatrix, m_pJointOrig, m_pJointZ, m_pMatrix, m_pRobot, and Configuration::SetNumDOF(). Here is the call graph for this function:  |
|
|
Definition at line 52 of file Jacobian.cpp. References m_pJointMatrix, m_pJointOrig, m_pJointZ, and m_pMatrix. |
|
|
Definition at line 179 of file Jacobian.cpp. References Frame::GetTranslationVector(), m_bOrientation, m_bPosition, m_frObserve, m_nBaseJoint, m_nDof, m_nJoint, m_pJointMatrix, m_pMatrix, and Matrixmxn::SetValues(). Referenced by SetInterestPoint(). Here is the call graph for this function:  |
|
|
Definition at line 265 of file Jacobian.cpp. References Matrix4x4::Inverse(), and m_pJointMatrix. Referenced by IK_Jacobian::ComputeHomogeneousTerm(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 137 of file Jacobian.cpp. References Matrixmxn::Inverse(), and m_pMatrix. Here is the call graph for this function: 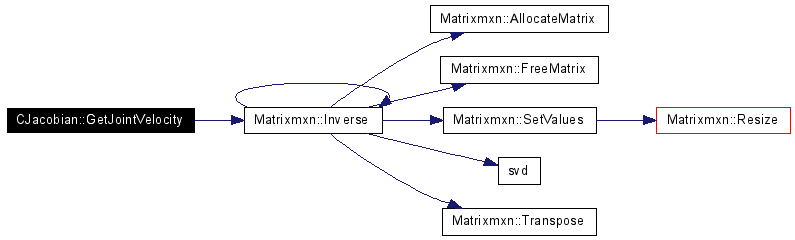 |
|
|
Definition at line 276 of file Jacobian.cpp. References m_pJointMatrix. Referenced by IK_Jacobian::ComputeHomogeneousTerm(). |
|
|
||||||||||||
|
Definition at line 129 of file Jacobian.cpp. References Matrixmxn::GetRows(), VectorN::Length(), and m_pMatrix. Here is the call graph for this function: 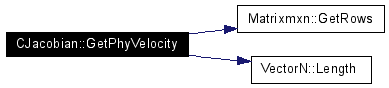 |
|
|
Definition at line 145 of file Jacobian.cpp. References m_configCurrent, and UpdateJoints(). Referenced by PL_MPEP::AdjustConfiguration(), PL_ForTest::AdjustConfiguration(), PL_RRT_ClosedChain::AdjustConfiguration(), PL_RRT_ClosedChain::ConnectToGoalJacobian(), PL_RRT_ClosedChain::ExtendJacobian(), PL_ForTest::FindLocalPath(), PL_PRM_ClosedJacobian::IsInterfering(), PL_PRM_ClosedJacobian::MakeItClosed(), PL_ForTest::Plan(), and PL_RRT_ClosedChain::TestJacobianConnection(). Here is the call graph for this function:  |
|
||||||||||||||||||||||||
|
Definition at line 88 of file Jacobian.cpp. References Calculate(), RobotBase::DOF(), m_bOrientation, m_bPosition, m_frObserve, m_nBaseJoint, m_nDof, m_nJoint, m_pMatrix, and m_pRobot. Referenced by PL_MPEP::AdjustConfiguration(), PL_ForTest::AdjustConfiguration(), PL_RRT_ClosedChain::AdjustConfiguration(), IK_Jacobian::ComputeHomogeneousTerm(), PL_RRT_ClosedChain::ConnectToGoalJacobian(), PL_RRT_ClosedChain::ExtendJacobian(), PL_ForTest::FindLocalPath(), PL_PRM_ClosedJacobian::IsInterfering(), PL_PRM_ClosedJacobian::MakeItClosed(), PL_ForTest::Plan(), and PL_RRT_ClosedChain::TestJacobianConnection(). Here is the call graph for this function:  |
|
|
Definition at line 159 of file Jacobian.cpp. References RobotBase::GetAllLinks(), Frame::GetTranslationVector(), m_configCurrent, m_nDof, m_pJointMatrix, m_pJointOrig, m_pJointZ, and m_pRobot. Referenced by SetConfiguration(). Here is the call graph for this function: 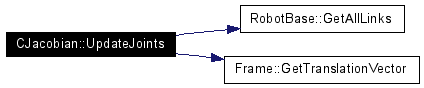 |
|
|
Definition at line 49 of file Jacobian.h. Referenced by Calculate(), CJacobian(), and SetInterestPoint(). |
|
|
Definition at line 50 of file Jacobian.h. Referenced by Calculate(), CJacobian(), and SetInterestPoint(). |
|
|
Definition at line 51 of file Jacobian.h. Referenced by CJacobian(), SetConfiguration(), and UpdateJoints(). |
|
|
Definition at line 43 of file Jacobian.h. Referenced by Calculate(), and SetInterestPoint(). |
|
|
Definition at line 42 of file Jacobian.h. Referenced by Calculate(), and SetInterestPoint(). |
|
|
Definition at line 40 of file Jacobian.h. Referenced by Calculate(), CJacobian(), SetInterestPoint(), and UpdateJoints(). |
|
|
Definition at line 41 of file Jacobian.h. Referenced by Calculate(), CJacobian(), and SetInterestPoint(). |
|
|
Definition at line 45 of file Jacobian.h. Referenced by Calculate(), CJacobian(), GetJointFrame(), GetJointWorldFrame(), UpdateJoints(), and ~CJacobian(). |
|
|
Definition at line 47 of file Jacobian.h. Referenced by CJacobian(), UpdateJoints(), and ~CJacobian(). |
|
|
Definition at line 46 of file Jacobian.h. Referenced by CJacobian(), UpdateJoints(), and ~CJacobian(). |
|
|
Definition at line 44 of file Jacobian.h. Referenced by Calculate(), CJacobian(), GetJointVelocity(), GetMatrix(), GetPhyVelocity(), SetInterestPoint(), and ~CJacobian(). |
|
|
Definition at line 48 of file Jacobian.h. Referenced by CJacobian(), SetInterestPoint(), and UpdateJoints(). |
 1.4.6-NO
1.4.6-NO