#include <planners/obsolete/PL_SimplexSubdivision.h>
Inherits PL_LinearCollision, and PL_OpenGL.
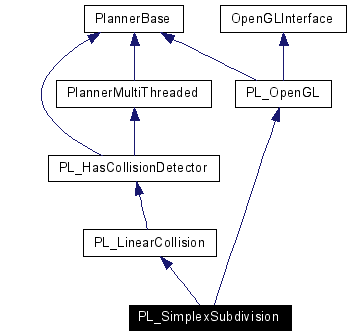
Inheritance diagram for PL_SimplexSubdivision:
Public Types | |
| enum | CollisionType { CT_FREE, CT_COLLISION, CT_MIXED, CT_UNKNOWN } |
Public Member Functions | |
| PL_SimplexSubdivision () | |
| virtual | ~PL_SimplexSubdivision () |
| virtual bool | DrawExplicit () const |
| virtual bool | Plan () |
| double | Volume (const int i) const |
Protected Types | |
| typedef std::set< int, ComparisonFunction > | INTSET |
Protected Member Functions | |
| void | AddEdge (const int node0, const int node1) |
| int | AddNode (const Configuration &min, const Configuration &max) |
| void | AddSuspiciousNode (const int nodeNum) |
| void | AddToOpenList (const int nodeNum) |
| CollisionType | CollisionCheck (const int n0, const int n1) |
| void | DeleteEdge (const int node0, const int node1) |
| void | DeleteNode (const int nodeNum) |
| void | ConnectStartAndGoal () |
| bool | IsAdjacent (int node0, int node1) |
| bool | SearchForGoal () |
| void | SubdivideLargestNode () |
| void | SubdivideNode (int nodeNum) |
Protected Attributes | |
| std::vector< Node > | m_Nodes |
| int | m_NodeStart |
| int | m_NodeGoal |
| std::set< int > | m_OpenList |
| std::set< int > | m_ClosedList |
| ComparisonFunction | m_Compare |
| INTSET | m_SuspiciousNodesAndVolumes |
Classes | |
| struct | ComparisonFunction |
| struct | Node |
Definition at line 34 of file PL_SimplexSubdivision.h.
|
|
Definition at line 165 of file PL_SimplexSubdivision.h. |
|
|
Definition at line 42 of file PL_SimplexSubdivision.h. |
|
|
Definition at line 31 of file PL_SimplexSubdivision.cpp. |
|
|
Definition at line 46 of file PL_SimplexSubdivision.cpp. |
|
||||||||||||
|
Definition at line 56 of file PL_SimplexSubdivision.cpp. References PL_SimplexSubdivision::Node::AddNeighbor(), IsAdjacent(), and m_Nodes. Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 75 of file PL_SimplexSubdivision.cpp. References PL_SimplexSubdivision::Node::m_Alive, PL_SimplexSubdivision::Node::m_DistanceFromStart, PL_SimplexSubdivision::Node::m_LocationOfCollision, PL_SimplexSubdivision::Node::m_Max, PL_SimplexSubdivision::Node::m_Min, PL_SimplexSubdivision::Node::m_NodesAdjacent, and VectorN::push_back(). Here is the call graph for this function:  |
|
|
Definition at line 99 of file PL_SimplexSubdivision.cpp. References m_SuspiciousNodesAndVolumes. |
|
|
Definition at line 111 of file PL_SimplexSubdivision.cpp. References m_OpenList. |
|
||||||||||||
|
Definition at line 132 of file PL_SimplexSubdivision.cpp. References m_Nodes, and PL_SimplexSubdivision::Node::m_NodesAdjacent. |
|
|
Definition at line 227 of file PL_SimplexSubdivision.cpp. References PL_HasCollisionDetector::collisionDetector, PlannerBase::GetGoalConfig(), PlannerBase::GetStartConfig(), CD_Linear::IsInterferingLinear(), m_NodeGoal, m_Nodes, m_NodeStart, and SubdivideNode(). Here is the call graph for this function: 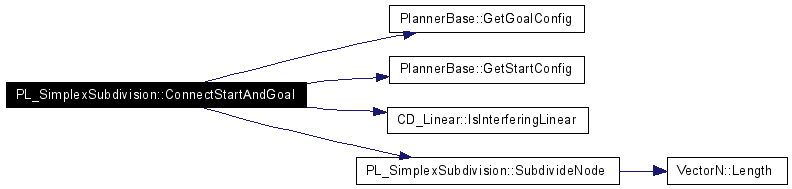 |
|
||||||||||||
|
Definition at line 268 of file PL_SimplexSubdivision.cpp. References m_Nodes, and PL_SimplexSubdivision::Node::RemoveNeighbor(). Referenced by DeleteNode(). Here is the call graph for this function:  |
|
|
Definition at line 281 of file PL_SimplexSubdivision.cpp. References DeleteEdge(), PL_SimplexSubdivision::Node::m_Alive, m_Nodes, and PL_SimplexSubdivision::Node::m_NodesAdjacent. Here is the call graph for this function:  |
|
|
Reimplemented from PL_OpenGL. Definition at line 304 of file PL_SimplexSubdivision.cpp. References Configuration::DOF(), PlannerBase::GetGoalConfig(), Semaphore::Lock(), and m_Nodes. Here is the call graph for this function: 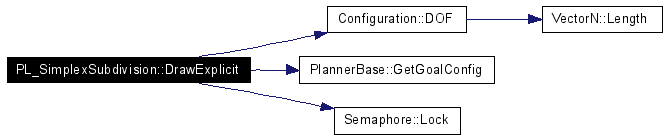 |
|
||||||||||||
|
Definition at line 436 of file PL_SimplexSubdivision.cpp. References Configuration::DOF(), PL_SimplexSubdivision::Node::m_Max, PL_SimplexSubdivision::Node::m_Min, and m_Nodes. Referenced by AddEdge(). Here is the call graph for this function:  |
|
|
Implements PlannerBase. Definition at line 480 of file PL_SimplexSubdivision.cpp. References PL_HasCollisionDetector::collisionDetector, Configuration::DOF(), PlannerBase::GetStartConfig(), CD_BasicStyle::JointMax(), CD_BasicStyle::JointMin(), m_Nodes, and PlannerBase::StartTimer(). Here is the call graph for this function: 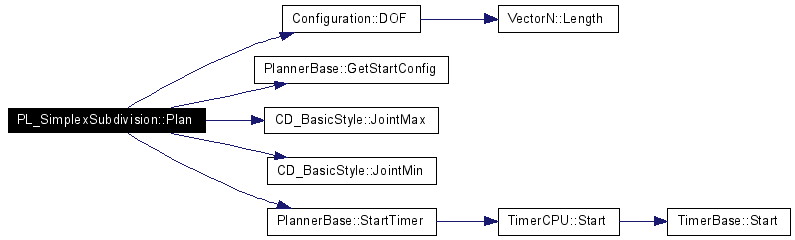 |
|
|
Definition at line 593 of file PL_SimplexSubdivision.cpp. References PL_SimplexSubdivision::Node::m_DistanceFromStart, m_Nodes, PL_SimplexSubdivision::Node::m_NodesAdjacent, and m_OpenList. |
|
|
Definition at line 680 of file PL_SimplexSubdivision.cpp. References m_SuspiciousNodesAndVolumes, SubdivideNode(), and Volume(). Here is the call graph for this function:  |
|
|
Definition at line 700 of file PL_SimplexSubdivision.cpp. References VectorN::Length(), PL_SimplexSubdivision::Node::m_Max, PL_SimplexSubdivision::Node::m_Min, and m_Nodes. Referenced by ConnectStartAndGoal(), and SubdivideLargestNode(). Here is the call graph for this function:  |
|
|
Definition at line 791 of file PL_SimplexSubdivision.cpp. References m_Nodes. Referenced by SubdivideLargestNode(). |
|
|
Definition at line 155 of file PL_SimplexSubdivision.h. |
|
|
Definition at line 164 of file PL_SimplexSubdivision.h. |
|
|
Definition at line 152 of file PL_SimplexSubdivision.h. Referenced by ConnectStartAndGoal(). |
|
|
Definition at line 148 of file PL_SimplexSubdivision.h. Referenced by AddEdge(), CollisionCheck(), ConnectStartAndGoal(), DeleteEdge(), DeleteNode(), DrawExplicit(), IsAdjacent(), Plan(), SearchForGoal(), SubdivideNode(), and Volume(). |
|
|
Definition at line 151 of file PL_SimplexSubdivision.h. Referenced by ConnectStartAndGoal(). |
|
|
Definition at line 154 of file PL_SimplexSubdivision.h. Referenced by AddToOpenList(), and SearchForGoal(). |
|
|
Definition at line 166 of file PL_SimplexSubdivision.h. Referenced by AddSuspiciousNode(), and SubdivideLargestNode(). |
 1.4.6-NO
1.4.6-NO