#include <collisiondetectors/CD_Swiftpp.h>
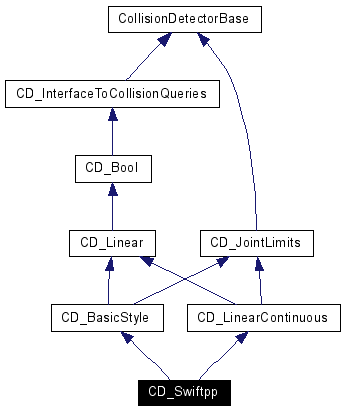
Inherits CD_BasicStyle, and CD_LinearContinuous.
Inheritance diagram for CD_Swiftpp:
Public Member Functions | |
| CD_Swiftpp (const Universe &universe) | |
| CD_Swiftpp (const CD_Swiftpp &right) | |
| virtual | ~CD_Swiftpp () |
| virtual CollisionDetectorBase * | Clone () const |
| int | AddMeshToSwiftScene (const Mesh &mesh, const bool bFixed) |
| bool | AddEntityToSwiftScene (const Entity *entity) |
| void | DeactivateFrames (const unsigned int frame1, const int frame2=-1) |
| void | ActivateFrames (const unsigned int frame1, const int frame2=-1) |
| bool | QueryContactDetermination (const Configuration &config, bool bEarlyExit, SWIFT_Real tolerance, int &num_pairs, int **oids, int **num_contacts, SWIFT_Real **distances=NO_DISTANCES, SWIFT_Real **nearest_pts=NO_NEAREST_PTS, SWIFT_Real **normals=NO_NORMALS) |
| bool | IsInterfering (const Configuration &config) |
| int | GetRobotLinkBaseFrame (int objectId) |
| void | SetObstacleTolerance (double tol) |
Public Attributes | |
| std::vector< Mesh * > | m_vMeshes |
Protected Member Functions | |
| void | UpdateMovedLink (const unsigned int linkNum) const |
Protected Attributes | |
| SWIFT_Scene * | m_pSwiftScene |
| std::vector< std::set< unsigned int > > | m_vLinkSwiftpp |
| std::vector< int > | m_vSwiftppIndexes |
Private Attributes | |
| double | m_dObsTol |
| Universe * | m_pUniversePointer |
Definition at line 35 of file CD_Swiftpp.h.
|
|
Definition at line 40 of file CD_Swiftpp.cpp. References AddEntityToSwiftScene(), CD_BasicStyle::entities, m_pSwiftScene, and CD_BasicStyle::theFrameManager. Referenced by Clone(). Here is the call graph for this function:  |
|
|
Definition at line 99 of file CD_Swiftpp.cpp. References AddEntityToSwiftScene(), m_pSwiftScene, and m_vMeshes. Here is the call graph for this function:  |
|
|
Definition at line 118 of file CD_Swiftpp.cpp. References m_vMeshes. |
|
||||||||||||
|
Definition at line 396 of file CD_Swiftpp.cpp. References CD_BasicStyle::ActivateFrames(), CD_BasicStyle::FramePairPermEnabled(), m_pSwiftScene, and m_vLinkSwiftpp. Here is the call graph for this function:  |
|
|
Definition at line 151 of file CD_Swiftpp.cpp. References Entity::BaseFrame(), and m_vLinkSwiftpp. Referenced by CD_Swiftpp(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 196 of file CD_Swiftpp.cpp. References Mesh::Clone(), Mesh::facets, FILENAME, m_vMeshes, MAX_FILENAME_LENGTH, MIN_FILENAME_LENGTH, POLY, POLYEXT, and Mesh::vertexes. Here is the call graph for this function:  |
|
|
Implements CD_BasicStyle. Definition at line 143 of file CD_Swiftpp.cpp. References CD_Swiftpp(). Here is the call graph for this function:  |
|
||||||||||||
|
Definition at line 347 of file CD_Swiftpp.cpp. References CD_BasicStyle::DeactivateFrames(), m_pSwiftScene, and m_vLinkSwiftpp. Here is the call graph for this function:  |
|
|
Definition at line 550 of file CD_Swiftpp.cpp. References m_vLinkSwiftpp. |
|
|
Implements CD_Bool. Definition at line 508 of file CD_Swiftpp.cpp. References Entity::GetTransform(), CD_Bool::IncrementCallCount(), Semaphore::Lock(), m_vMeshes, and CD_BasicStyle::SetConfiguration(). Here is the call graph for this function: 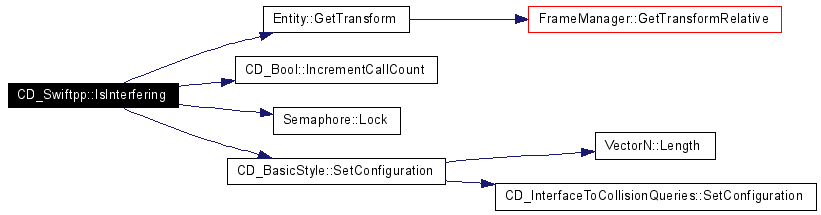 |
|
||||||||||||||||||||||||||||||||||||||||
|
Definition at line 457 of file CD_Swiftpp.cpp. References Entity::GetTransform(), CD_Bool::IncrementCallCount(), Semaphore::Lock(), m_vMeshes, and CD_BasicStyle::SetConfiguration(). Here is the call graph for this function: 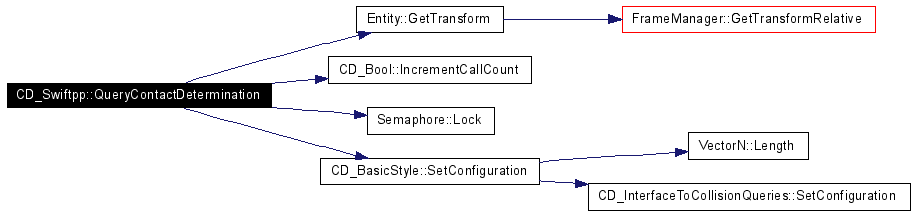 |
|
|
Definition at line 107 of file CD_Swiftpp.h. References m_dObsTol. |
|
|
|
|
|
Definition at line 125 of file CD_Swiftpp.h. Referenced by SetObstacleTolerance(). |
|
|
Definition at line 117 of file CD_Swiftpp.h. Referenced by ActivateFrames(), CD_Swiftpp(), and DeactivateFrames(). |
|
|
Definition at line 126 of file CD_Swiftpp.h. |
|
|
Definition at line 120 of file CD_Swiftpp.h. Referenced by ActivateFrames(), AddEntityToSwiftScene(), DeactivateFrames(), and GetRobotLinkBaseFrame(). |
|
|
Definition at line 110 of file CD_Swiftpp.h. Referenced by AddMeshToSwiftScene(), CD_Swiftpp(), IsInterfering(), QueryContactDetermination(), and ~CD_Swiftpp(). |
|
|
Definition at line 121 of file CD_Swiftpp.h. |
 1.4.6-NO
1.4.6-NO