#include <planners/closedchain/PL_PRM_ClosedChain.h>
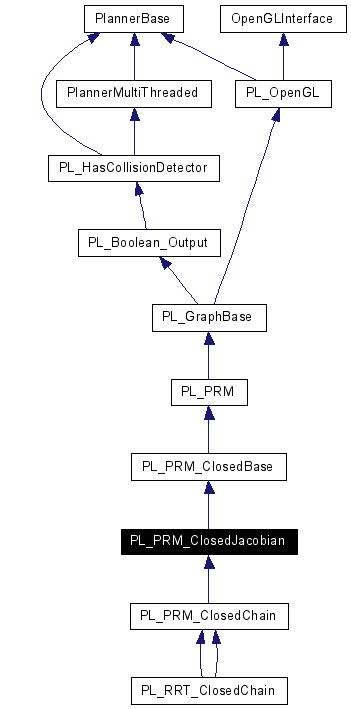
Inherits PL_PRM_ClosedBase.
Inherited by PL_PRM_ClosedChain [virtual].
Inheritance diagram for PL_PRM_ClosedJacobian:
Public Member Functions | |
| PL_PRM_ClosedJacobian () | |
| ~PL_PRM_ClosedJacobian () | |
| virtual void | SetCollisionDetector (CD_BasicStyle *collisionDetector) |
| virtual bool | MakeItClosed (Configuration &conf) |
| virtual bool | IsInterfering (const Configuration &c1, const Configuration &c2) |
Protected Attributes | |
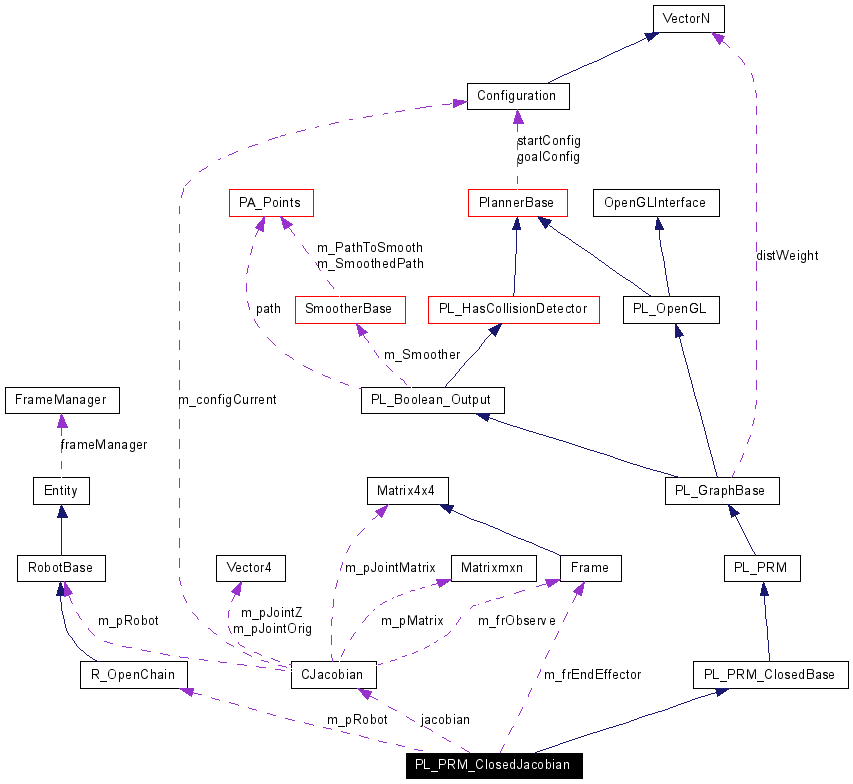
| R_OpenChain * | m_pRobot |
| int | m_nDof |
| int | m_nToolFrame |
| Frame | m_frEndEffector |
| CJacobian * | jacobian |
Definition at line 93 of file PL_PRM_ClosedChain.h.
|
|
Definition at line 395 of file PL_PRM_ClosedChain.cpp. |
|
|
Definition at line 401 of file PL_PRM_ClosedChain.cpp. References jacobian. |
|
||||||||||||
|
Implements PL_PRM_ClosedBase. Reimplemented in PL_PRM_ClosedChain. Definition at line 456 of file PL_PRM_ClosedChain.cpp. References DEF_RESOLUTION, PL_PRM_ClosedBase::edgeFrag, CJacobian::GetMatrix(), Matrixmxn::Inverse(), PL_GraphBase::IsInterfering(), jacobian, m_frEndEffector, m_nDof, VectorN::Magnitude(), MakeItClosed(), CJacobian::SetConfiguration(), and CJacobian::SetInterestPoint(). Referenced by PL_PRM_ClosedChain::IsInterfering(). Here is the call graph for this function: 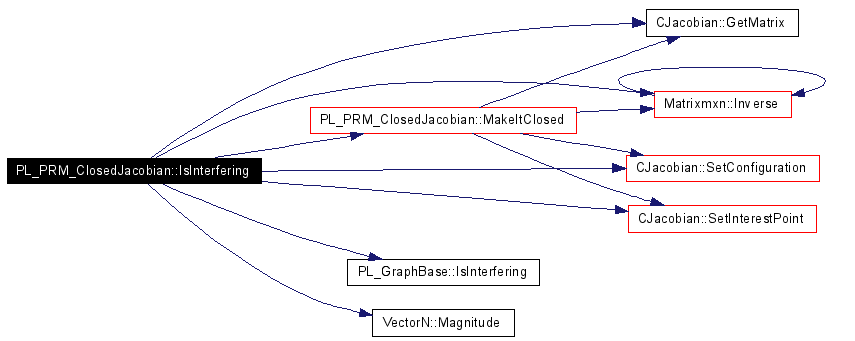 |
|
|
Implements PL_PRM_ClosedBase. Reimplemented in PL_PRM_ClosedChain. Definition at line 429 of file PL_PRM_ClosedChain.cpp. References DEF_ERR_TOLERANCE, CJacobian::GetMatrix(), PL_PRM_ClosedBase::GetToolFrame(), Frame::GetTranslationVector(), Matrixmxn::Inverse(), jacobian, m_frEndEffector, m_nDof, Vector4::Magnitude(), Rad2Deg(), CJacobian::SetConfiguration(), and CJacobian::SetInterestPoint(). Referenced by IsInterfering(), and PL_PRM_ClosedChain::MakeItClosed(). Here is the call graph for this function: 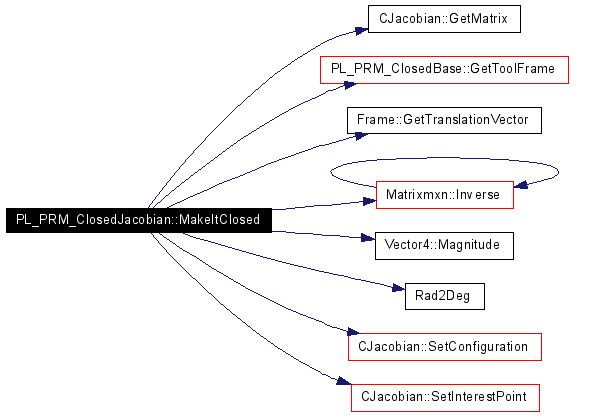 |
|
|
Reimplemented from PL_PRM. Reimplemented in PL_PRM_ClosedChain, PL_RRT_ClosedChain, PL_PRM_ClosedChain, and PL_RRT_ClosedChain. Definition at line 407 of file PL_PRM_ClosedChain.cpp. References PL_HasCollisionDetector::collisionDetector, CD_BasicStyle::DeactivateFrames(), CD_BasicStyle::DOF(), CD_BasicStyle::GetFrameManager(), FrameManager::GetFrameRef(), CD_BasicStyle::GetRobot(), R_OpenChain::GetToolFrame(), Matrix4x4::Identity(), jacobian, m_frEndEffector, m_nDof, m_nToolFrame, m_pRobot, and PL_PRM::SetCollisionDetector(). Here is the call graph for this function: 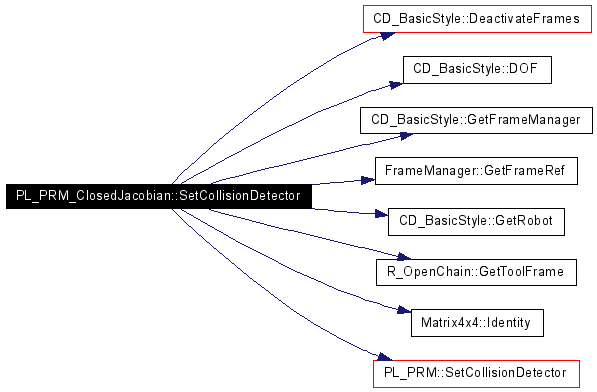 |
|
|
Reimplemented in PL_RRT_ClosedChain. Definition at line 108 of file PL_PRM_ClosedChain.h. Referenced by IsInterfering(), MakeItClosed(), PL_PRM_ClosedJacobian(), SetCollisionDetector(), and ~PL_PRM_ClosedJacobian(). |
|
|
Reimplemented in PL_RRT_ClosedChain. Definition at line 107 of file PL_PRM_ClosedChain.h. Referenced by IsInterfering(), MakeItClosed(), and SetCollisionDetector(). |
|
|
Reimplemented in PL_RRT_ClosedChain. Definition at line 105 of file PL_PRM_ClosedChain.h. Referenced by IsInterfering(), MakeItClosed(), and SetCollisionDetector(). |
|
|
Reimplemented in PL_RRT_ClosedChain. Definition at line 106 of file PL_PRM_ClosedChain.h. Referenced by SetCollisionDetector(). |
|
|
Reimplemented in PL_RRT_ClosedChain. Definition at line 104 of file PL_PRM_ClosedChain.h. Referenced by PL_PRM_ClosedJacobian(), and SetCollisionDetector(). |
 1.4.6-NO
1.4.6-NO